Cameras, Lenses and Light Fields⚓︎
约 3546 个字 预计阅读时间 18 分钟
CG 领域有两种成像(imaging) 方式,分别是:
因此本讲将围绕“相机”这一话题展开介绍。
-
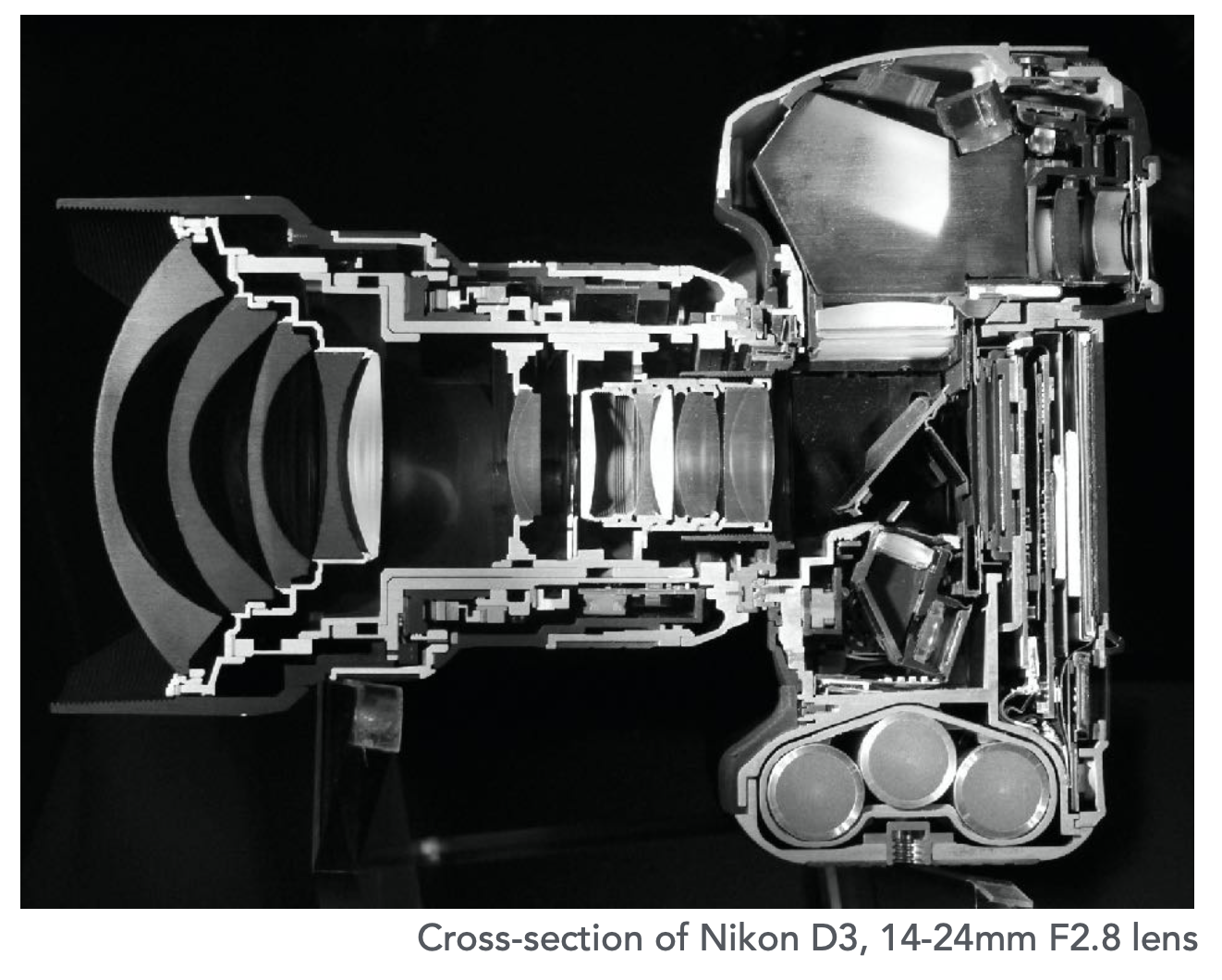
(现代)相机是一台精密仪器,其内部结构相当复杂
-
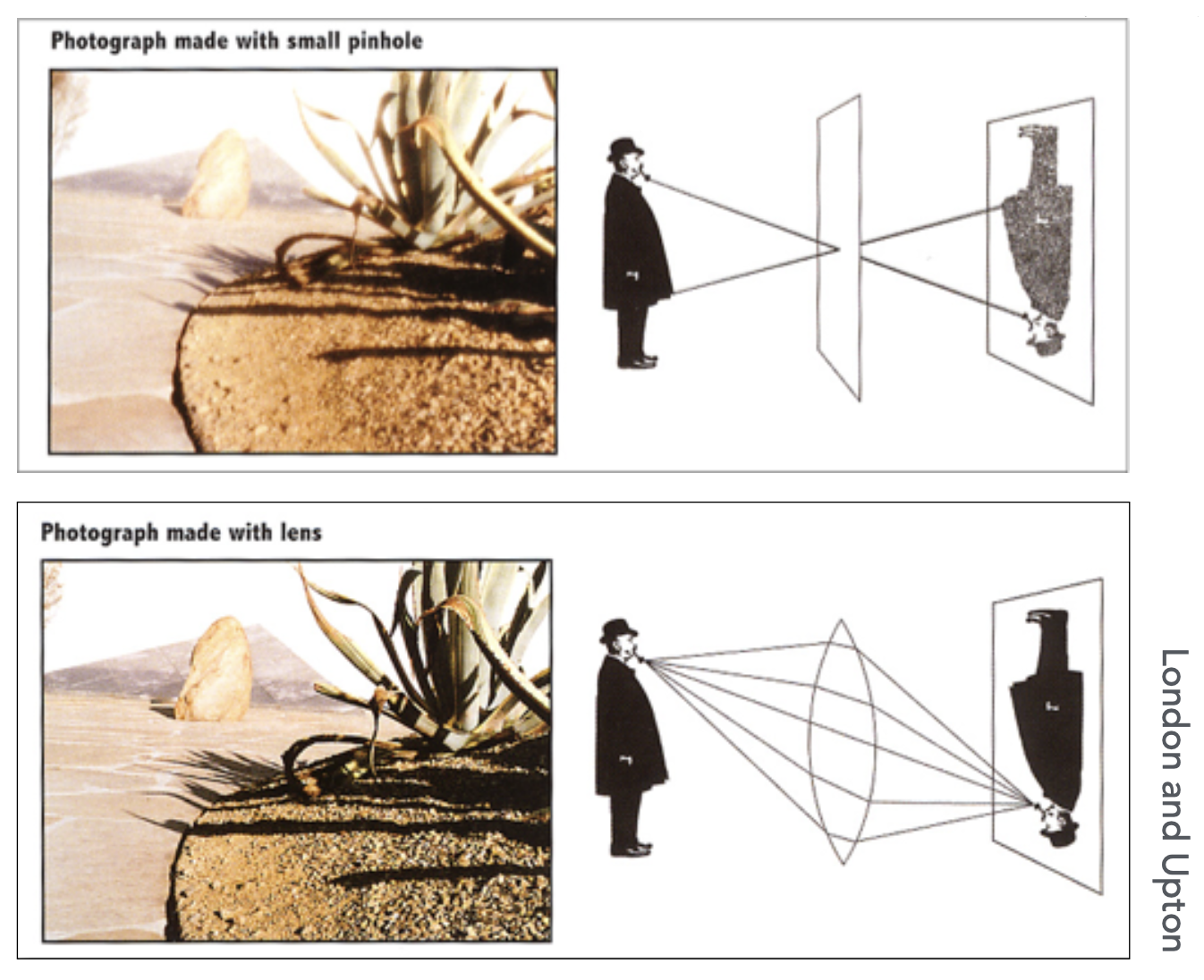
成像方式包括针孔(pinhole) 成像和透镜(lens) 成像
-
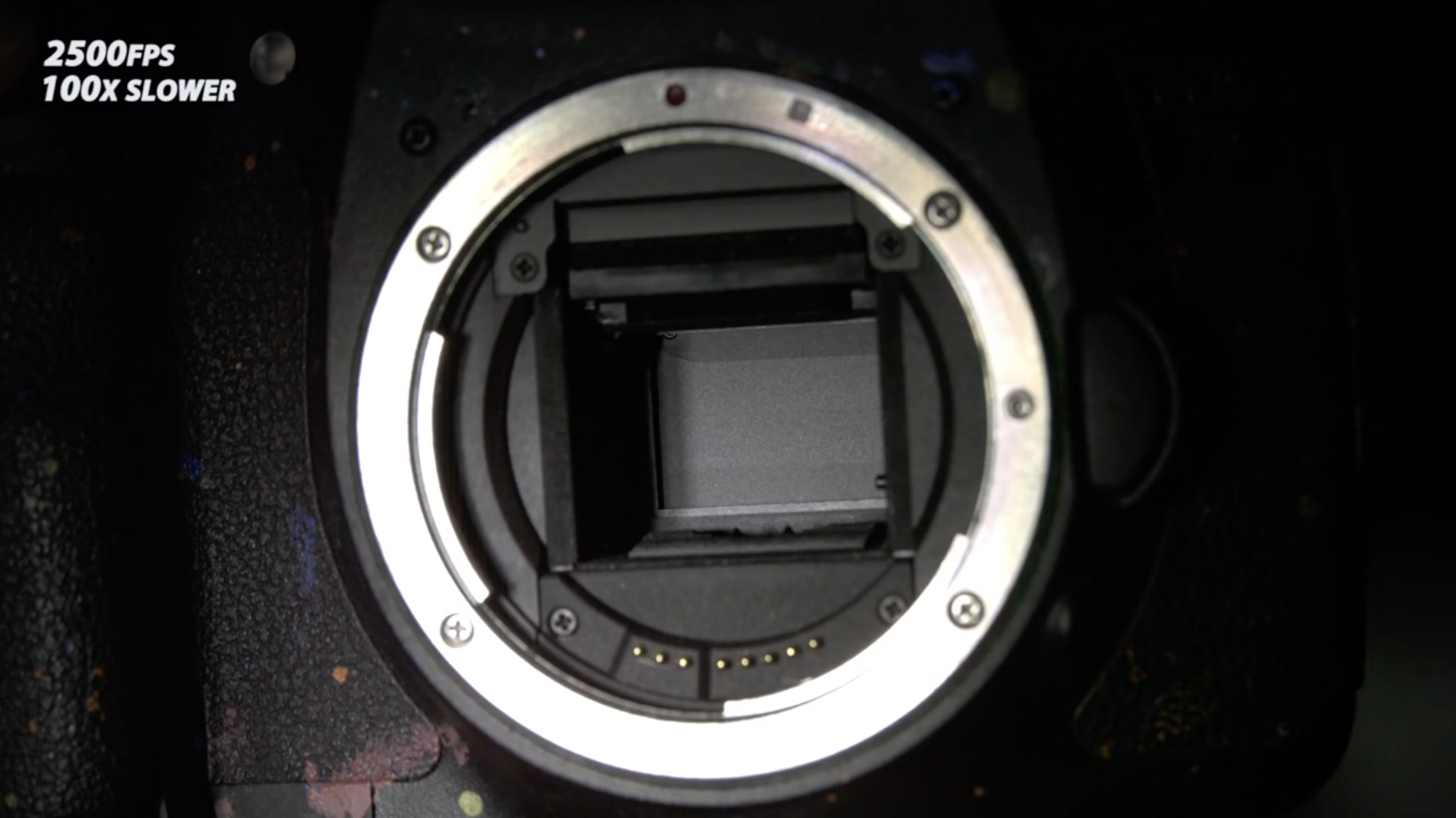
快门(shutter) 是相机的一个重要部件,用于控制光在一定时间内进入相机的量(曝光(exposure))
-
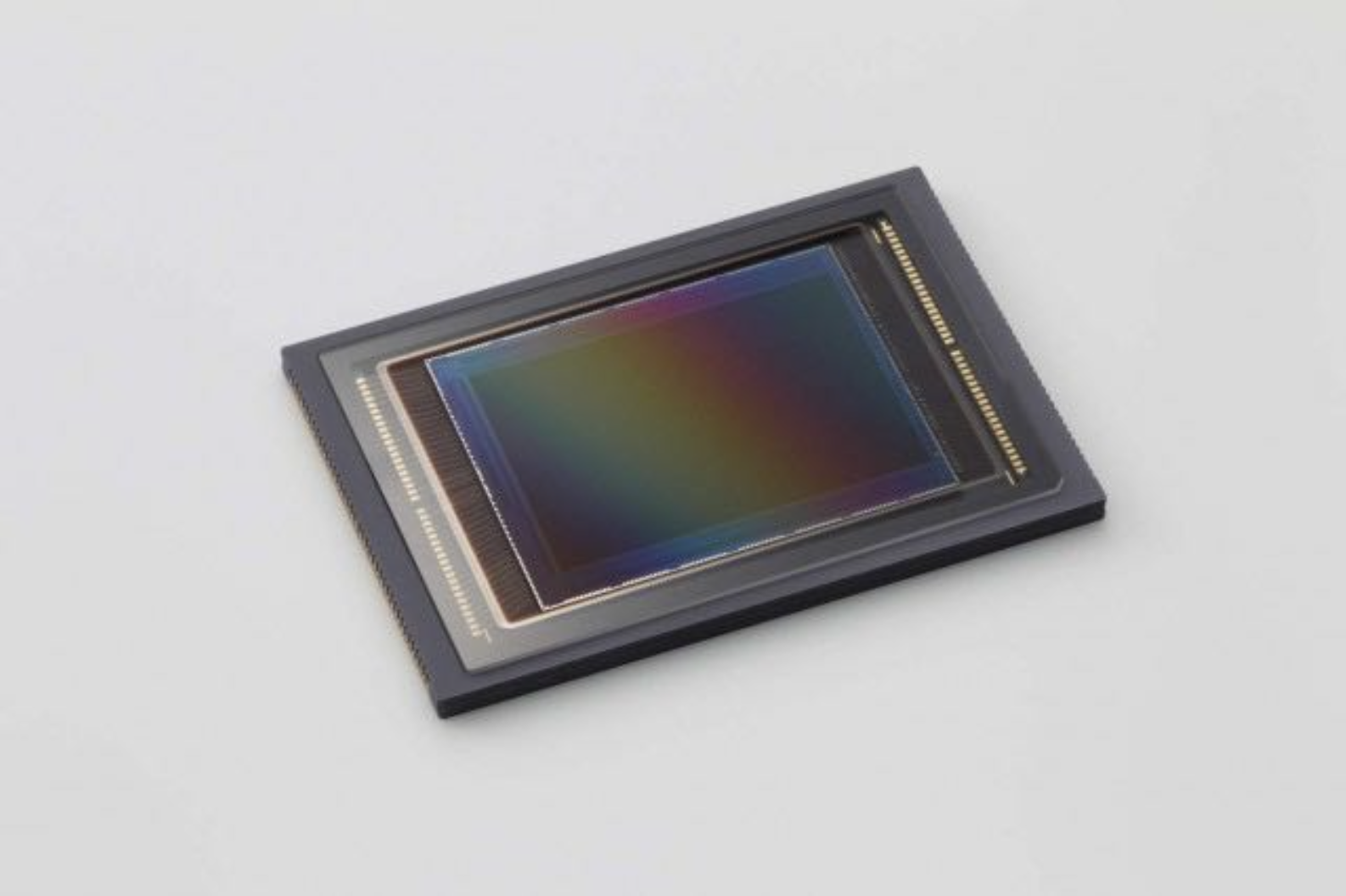
传感器(感光元件)用于记录曝光过程中的积累的辐照度(irradiance)
-
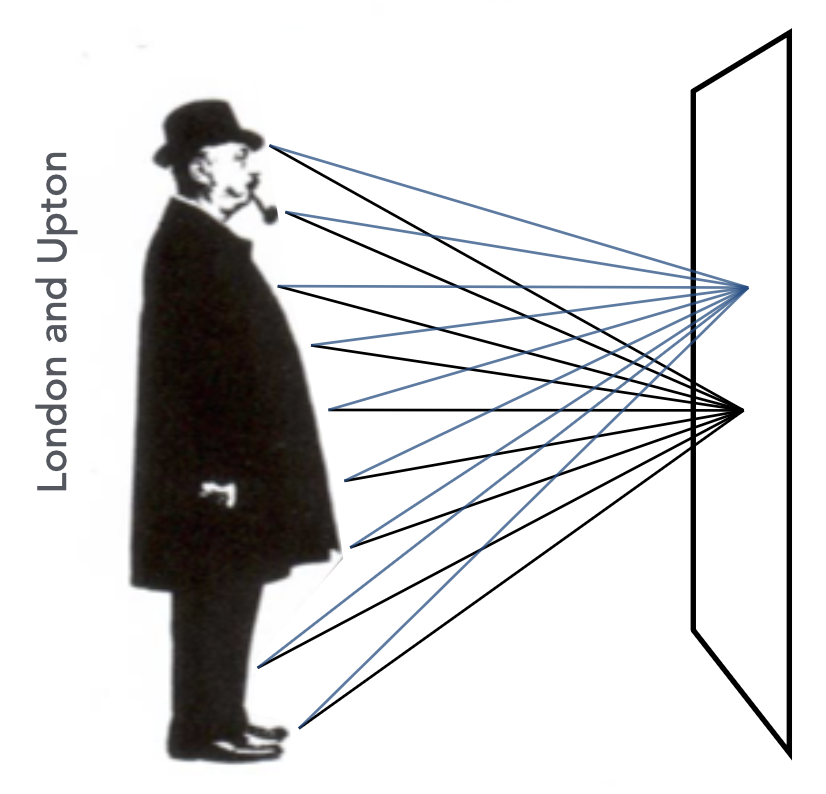
要是传感器没有透镜的话,传感器上的每一点会接收来自物体上所有点的光,因此照片上所有的像素值将会是差不多的
- 不过在计算成像领域中,仍有关于这一问题的研究,不过我们目前还是认为没有透镜是无法成像的
Pinhole Image Formation⚓︎
不过人们在发现透镜能够用于成像前先发现了可以用针孔成像,因而发明出针孔相机(pinhole camera)。

下面是用最大的针孔(左图,直径为 6mm)拍出来的照片(右图
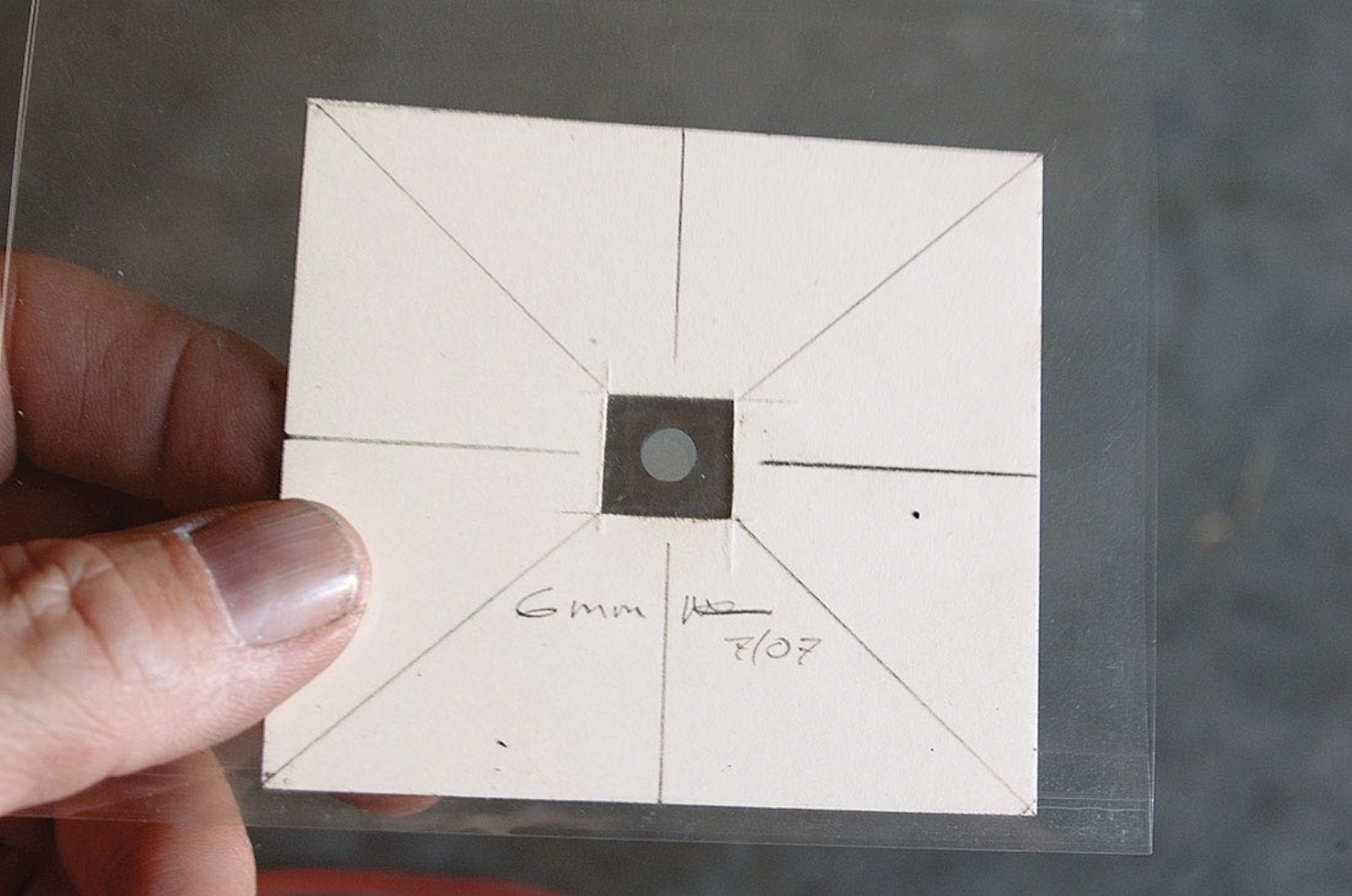

不过这样拍出的照片看不出虚化的地方,前中后都是清晰的。
Field of View⚓︎
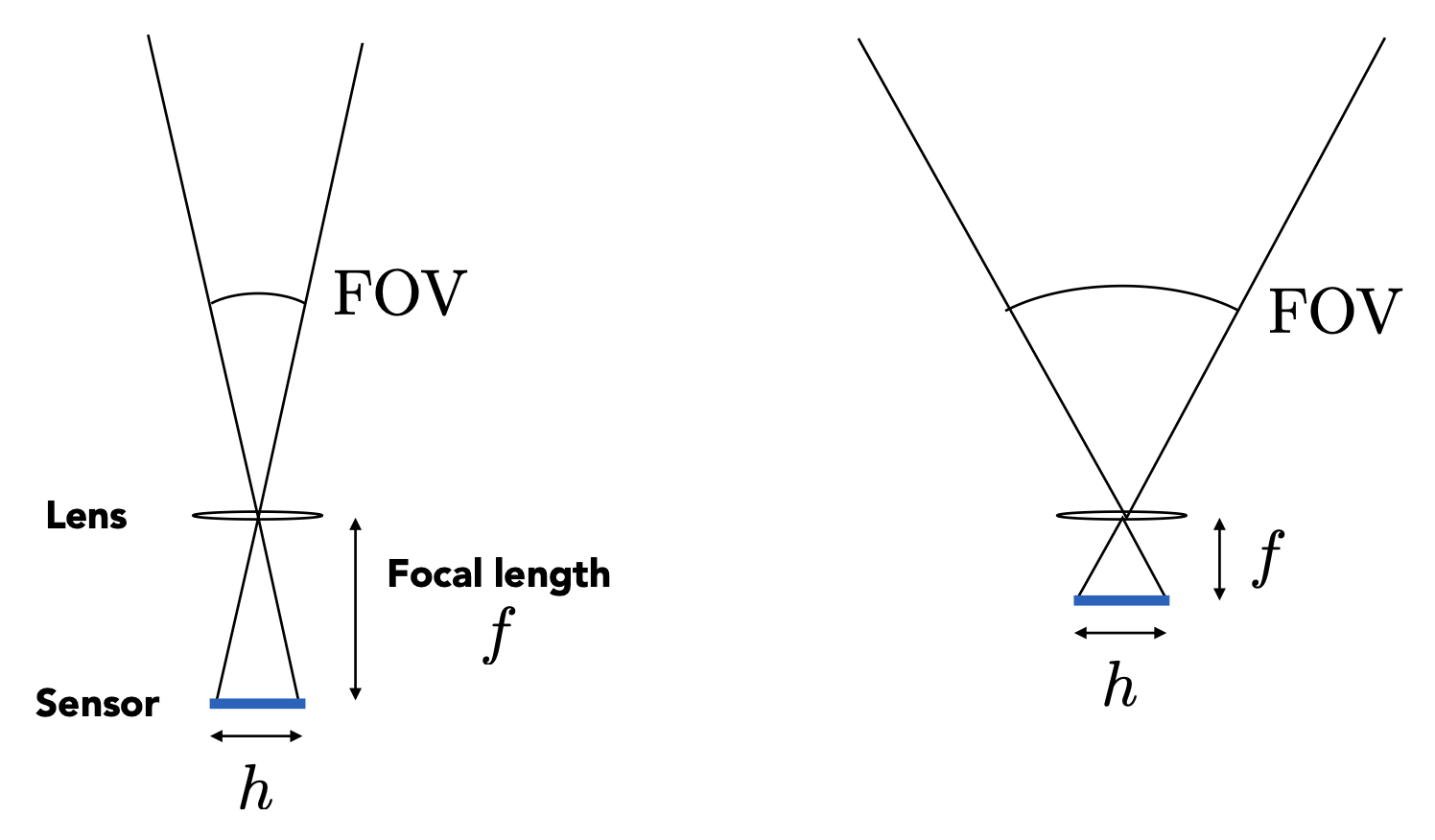
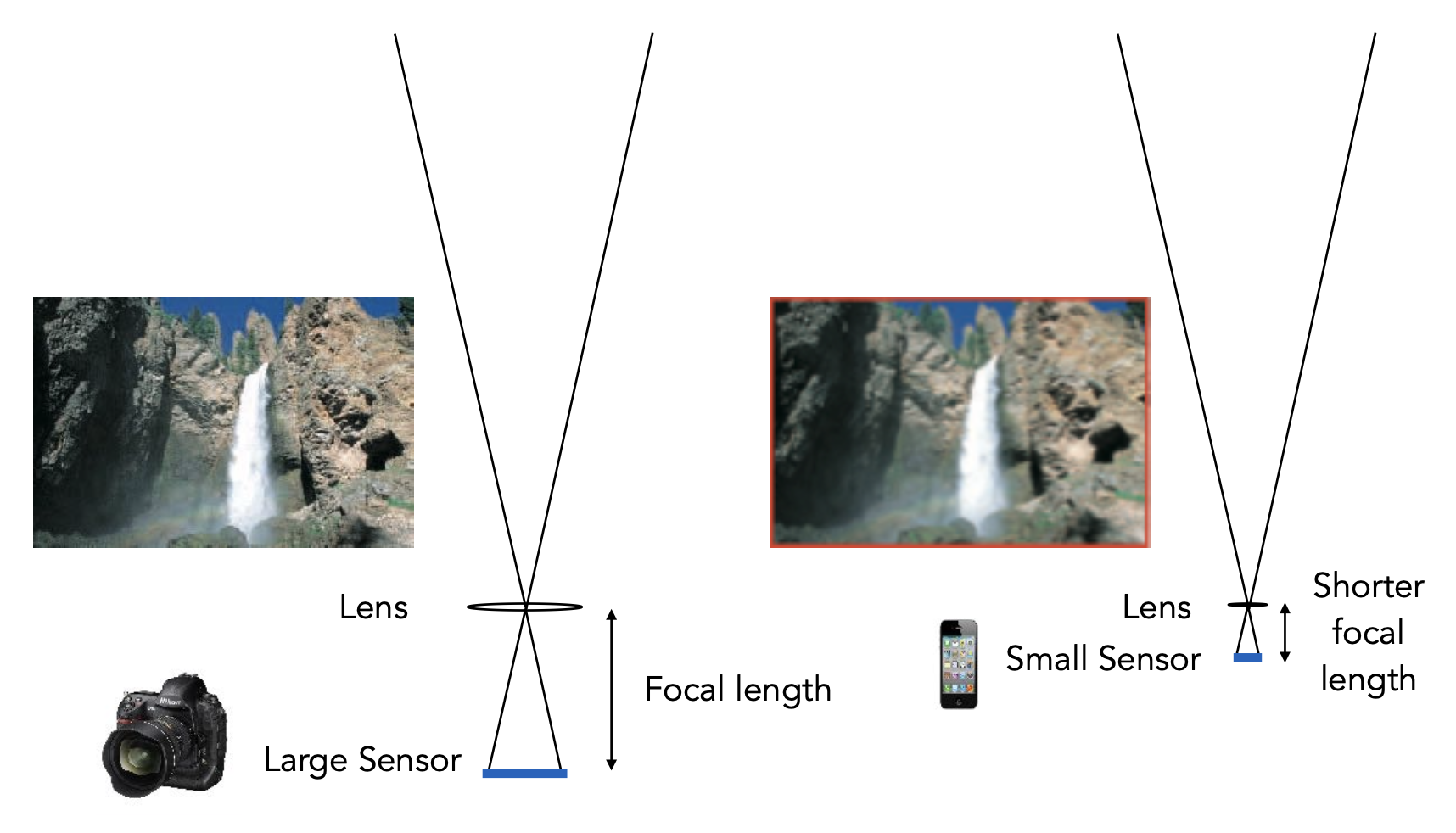
视场(field of view, FOV) 与焦距(focal length) 和传感器大小相关,公式为: $$ \text{FOV} = 2 \arctan \left(\dfrac{h}{2f}\right) $$
当传感器大小固定时,减小焦距会增大视场。
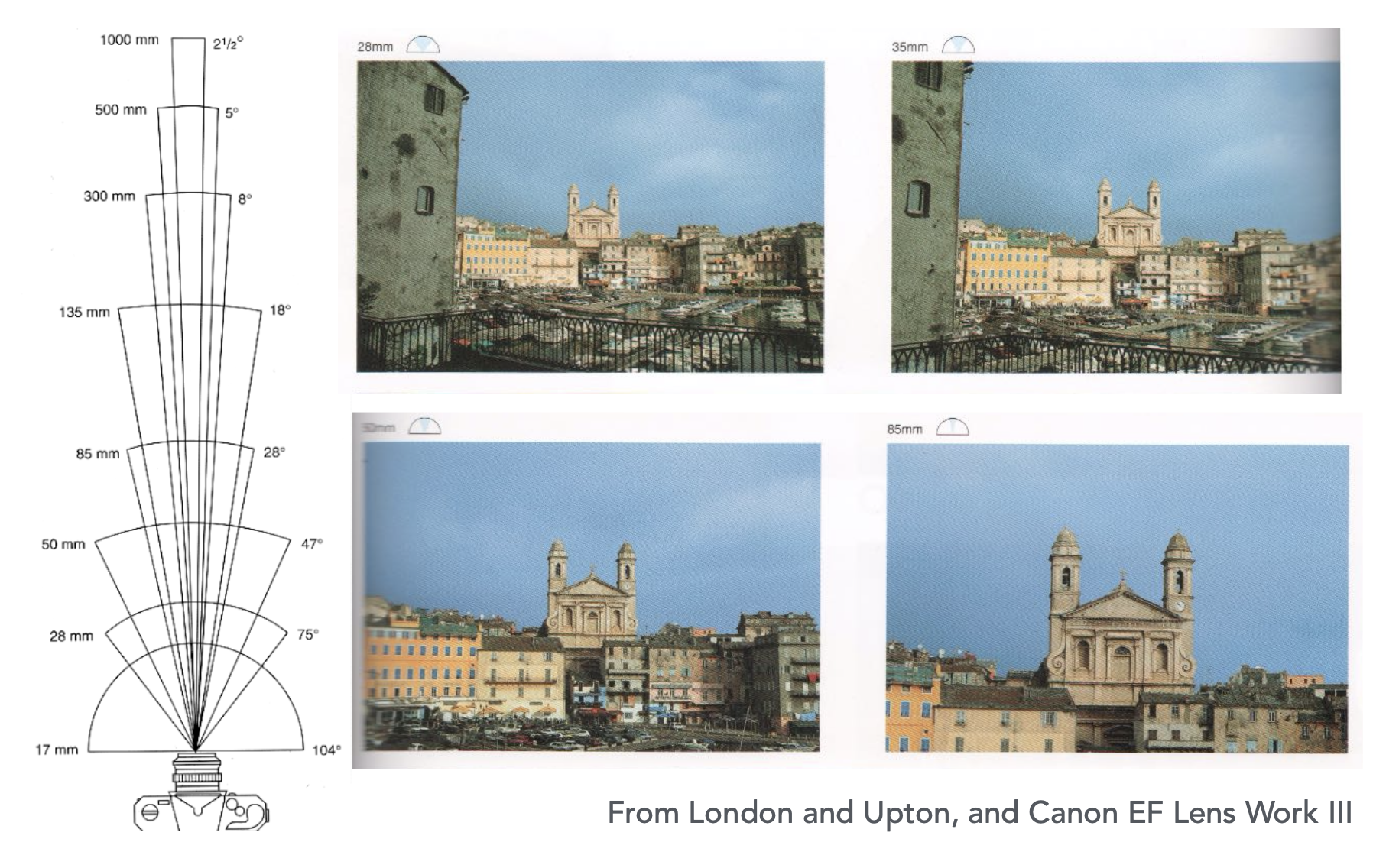
- 由于一些历史原因,我们通常以 35mm 格式的胶片(36x24mm)上使用的镜头焦距来指代视角场 (angular field of view)
- 一些关于 35mm 格式下的焦距的例子:
- 17mm:广角(104°)
- 50mm
: “常规”透镜(47°) - 200mm:长焦 (telephoto) 透镜(12°)
- 注意:当我们说当前手机拥有大约 28mm 的“等效”焦距时,遵循的是上述约定,而不是真的有 28mm 的焦距(远超现在的手机厚度了)
例子
而在焦距固定时,不同传感器大小对 FOV 的影响如下:
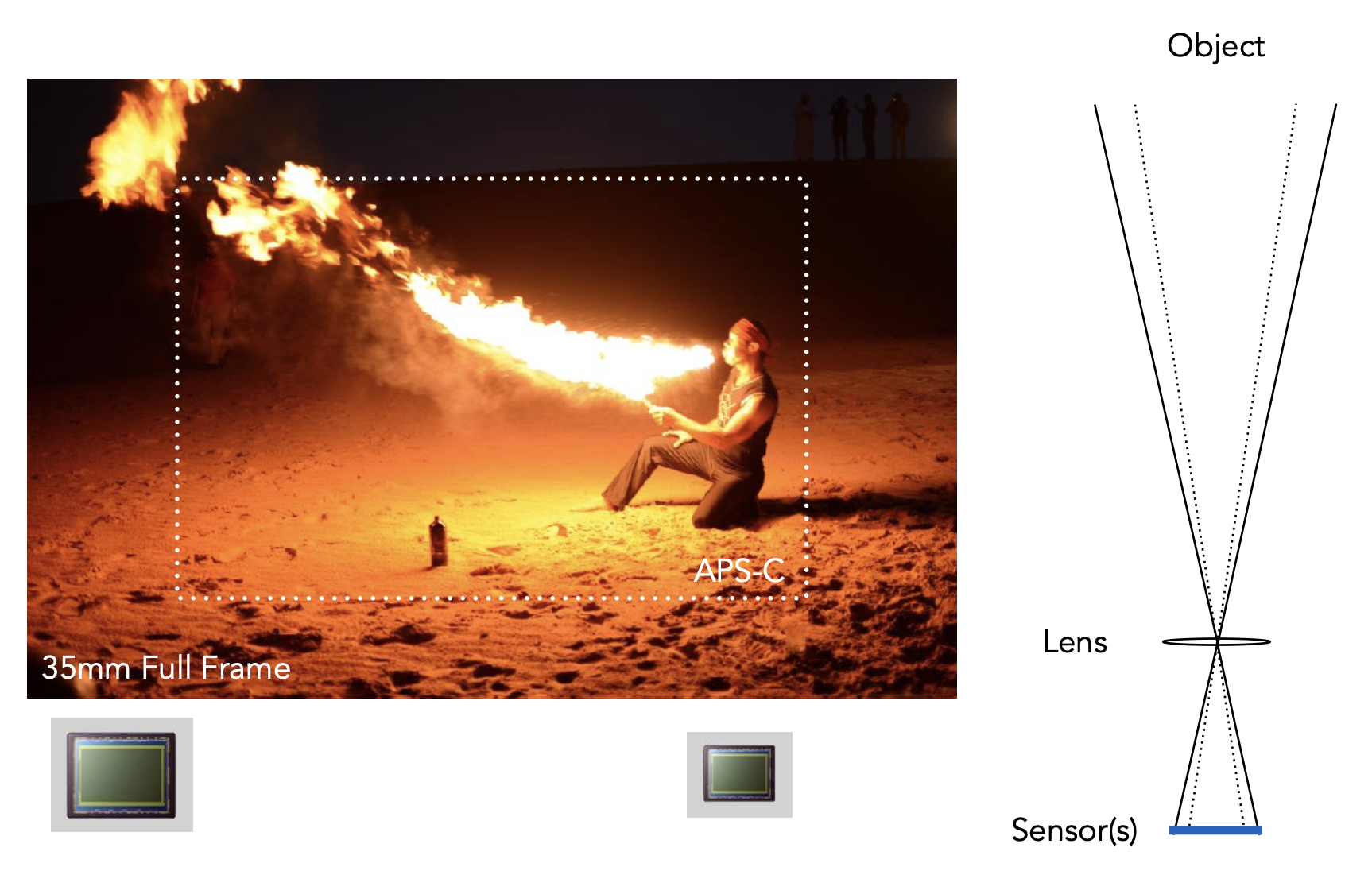
注意
目前我们可以混用“胶片”和“传感器”的概念。但在渲染器中,两者的概念并不一致。
例子:各种设备的传感器大小

要想在更小的传感器上维持相同大小的 FOV,需要按比例减小焦距。
Exposure⚓︎
曝光(exposure, H) = 时间(T) * 辐照度(irradiance, E)
- 曝光时间由快门控制
- 辐照度:落在传感器单位面积上的光的功率,由透镜光圈(aperture) 和焦距控制
因此有以下几个控制曝光的因素:
- 光圈大小:通过开 / 闭光圈改变 f 数(f-stop)
- 光圈是仿生学设计,仿照人的瞳孔
- 快门速度:改变传感器像素的曝光时间
- ISO 增益(感光度):改变在传感器值(硬件层面)和数码图像值(软件层面)之间的放大倍率 (amplification)(就是乘上一个数)
- 这是一种后期处理
以下是分别改变这三要素的效果:
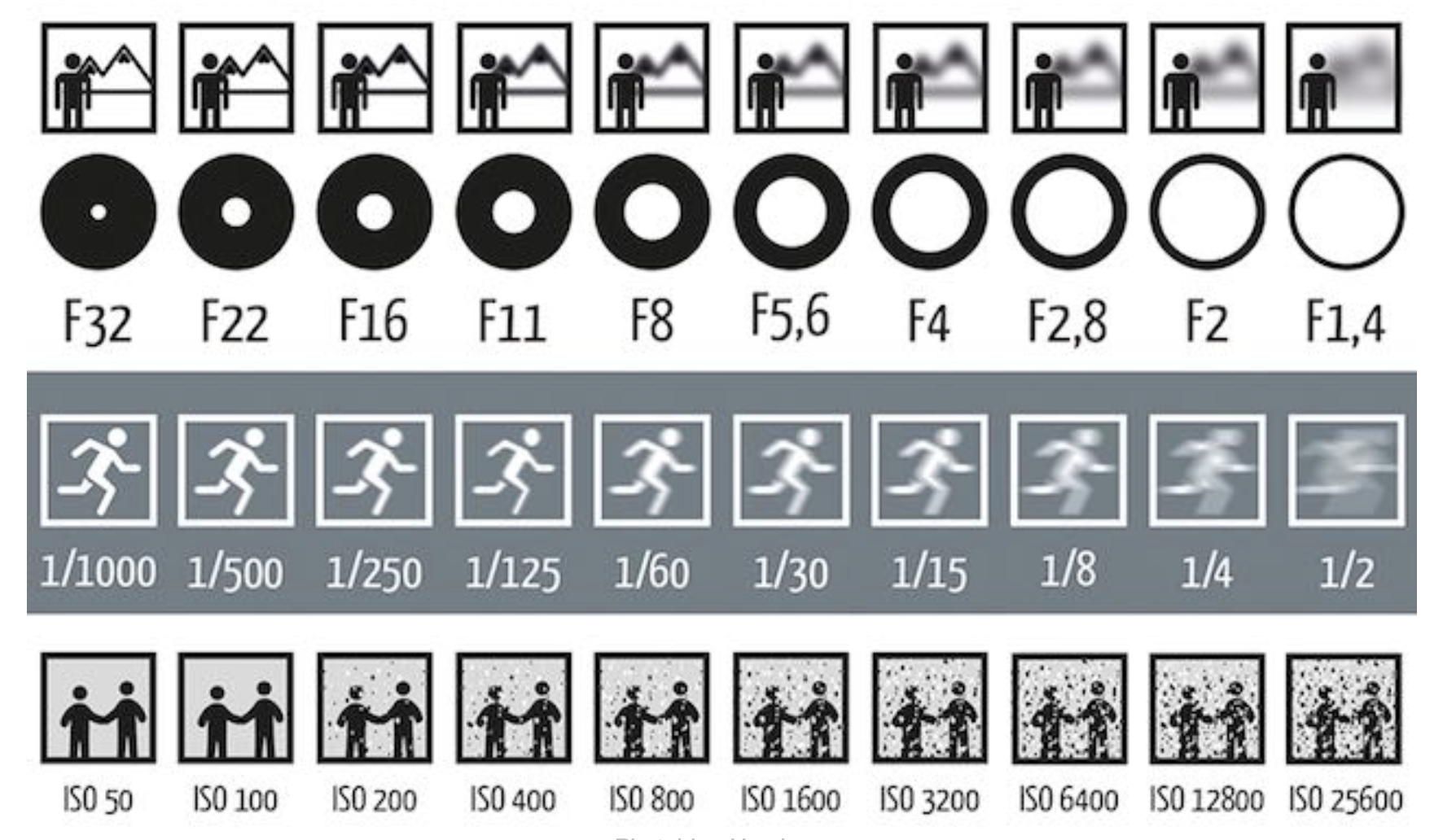
- 黑点是图像上的噪声,放大信号的同时也会放大噪声,因此图像上的噪点会更明显
- 图像上噪点出现原因的一种简单解释:把光看作光子,如果快门时间短,进入到感光元件的光子数少,因而产生噪点(解释清楚很复杂)
ISO Gain⚓︎
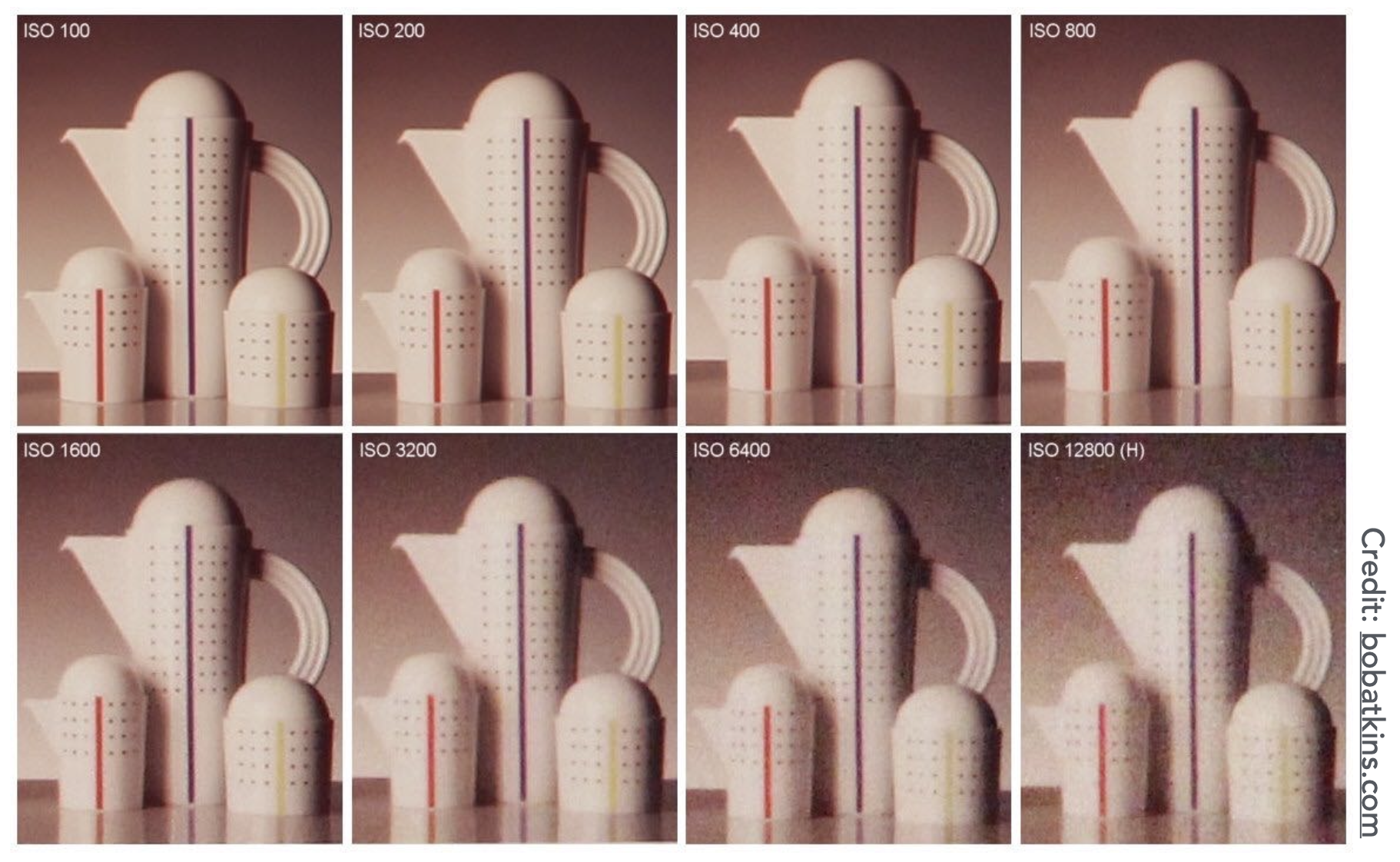
关于 ISO 增益(感光度)
- 胶片:以颗粒度(grain) 换取感光灵敏度
- 数码:以噪点(noise) 换取感光灵敏度
- 在模数转换(ADC)前放大信号
- 线性效应,比如 ISO 100 所需光线为 ISO 200 的一半
例子
F-Number(F-Stop): Exposure Levels⚓︎
f 数记作 F N 或 F/ N。对 f 数非正式的理解是:圆形光圈直径的倒数。

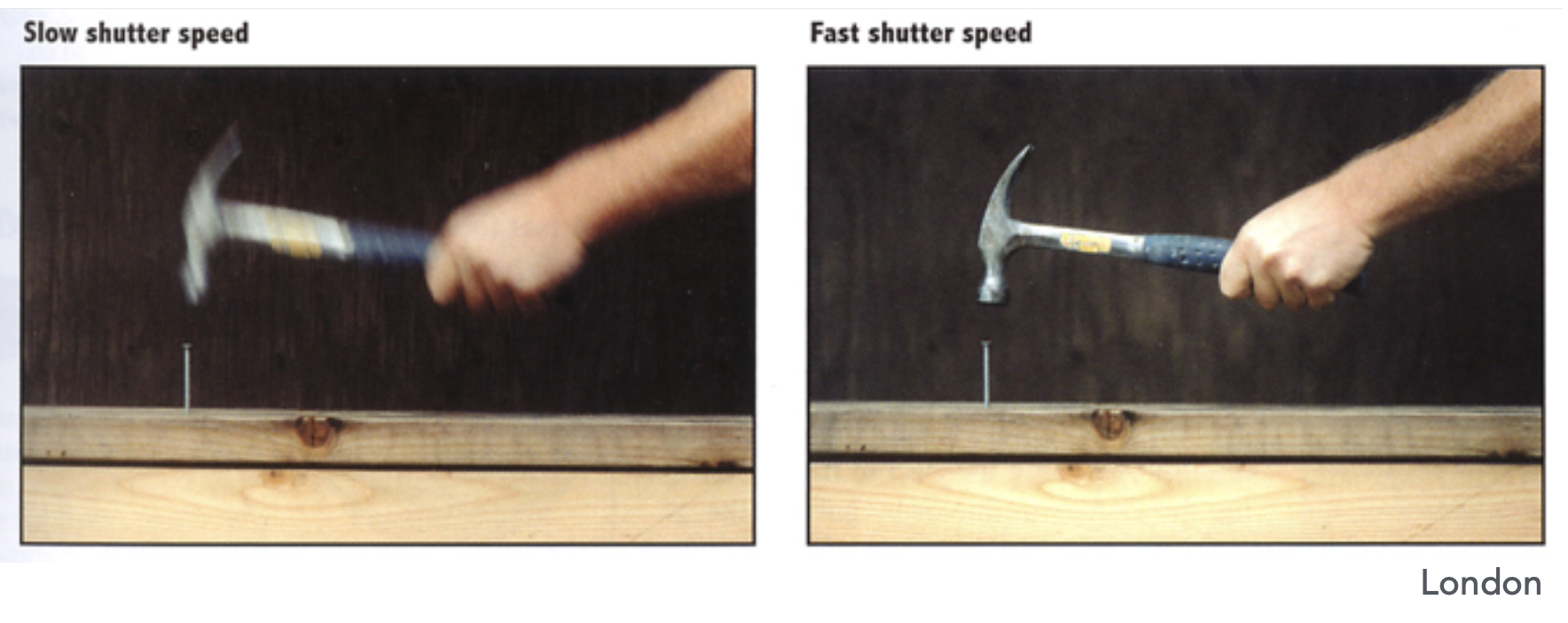
Side Effects of Shutter Speed⚓︎
快门速度的副作用包括:
-
运动模糊(motion blur)

- 原因:手抖、对象移动
- 运动模糊程度和快门开启时间成正比
- 但运动模糊并不总是一件坏事
- 从人的感知看,运动模糊能让我们感受物体运动速度的快慢
- 从时间采样角度看,运动模糊起到类似反走样的效果
-
滚动快门(rolling shutter):由于机械快门不是一下子就全部打开的,所以如果物体运动速度比快门打开速度还要快,拍出来的照片中物体看起来是扭曲的
-
例子:高速旋转的螺旋桨,照片上看上去是扭曲的

-
保持不变的曝光
以下光圈 - 快门速度配对(列)能够产生相同的曝光:

- 如果曝光结果太亮 / 太暗,可能需要调整 f 数和 / 或快门的开闭
- 对于拍摄移动中的物体,摄像师必须权衡好景深(depth of field)(最后会介绍)和运动模糊。
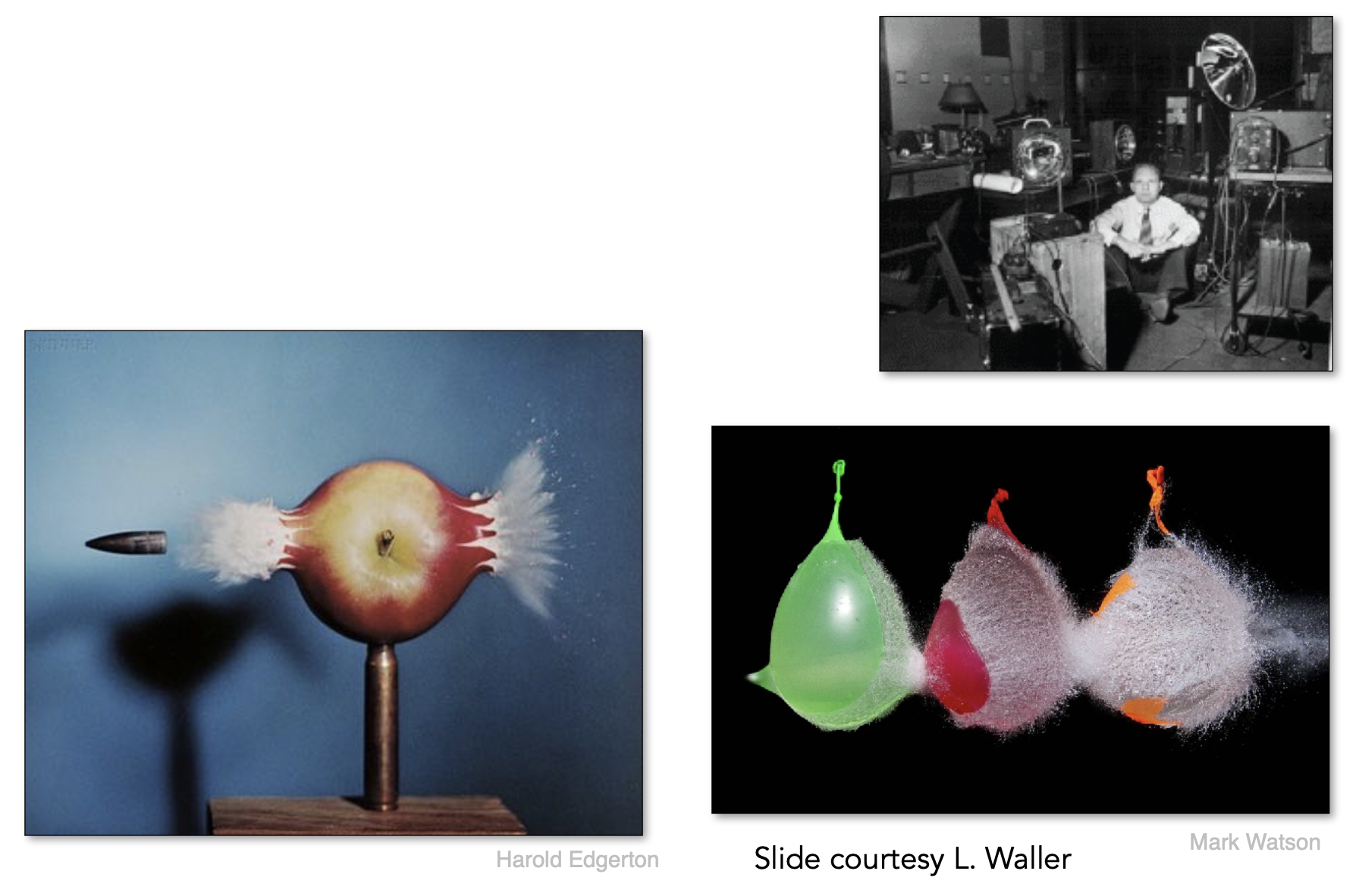
Fast and Slow Photography⚓︎
-
高速摄影(high-speed photography)
- 常规曝光 = 极快的快门速度 *(大光圈或大感光度)
例子
-
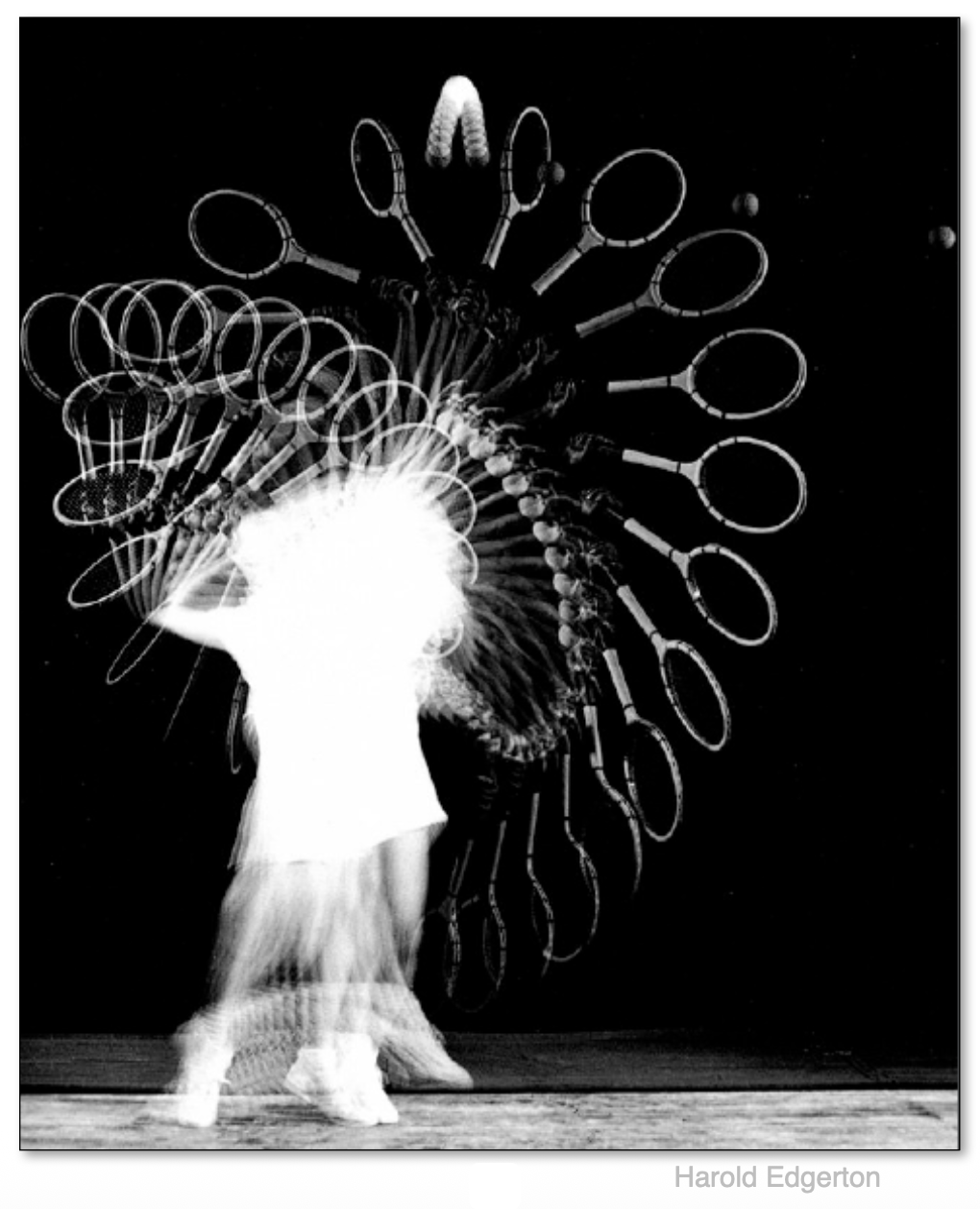
长曝光摄影(long-exposure photography)
例子

Thin Lens Approximation⚓︎
对于真实世界的透镜,
-
设计高度复杂(这是 iPhone 6s 的后置摄像头,现在的手机镜头还要复杂很多)

-
并不理想,会出现像差(aberration) 的问题
- 下图展示了实际平凸透镜(球面形状
) ,发现它无法将所有光汇聚于一点
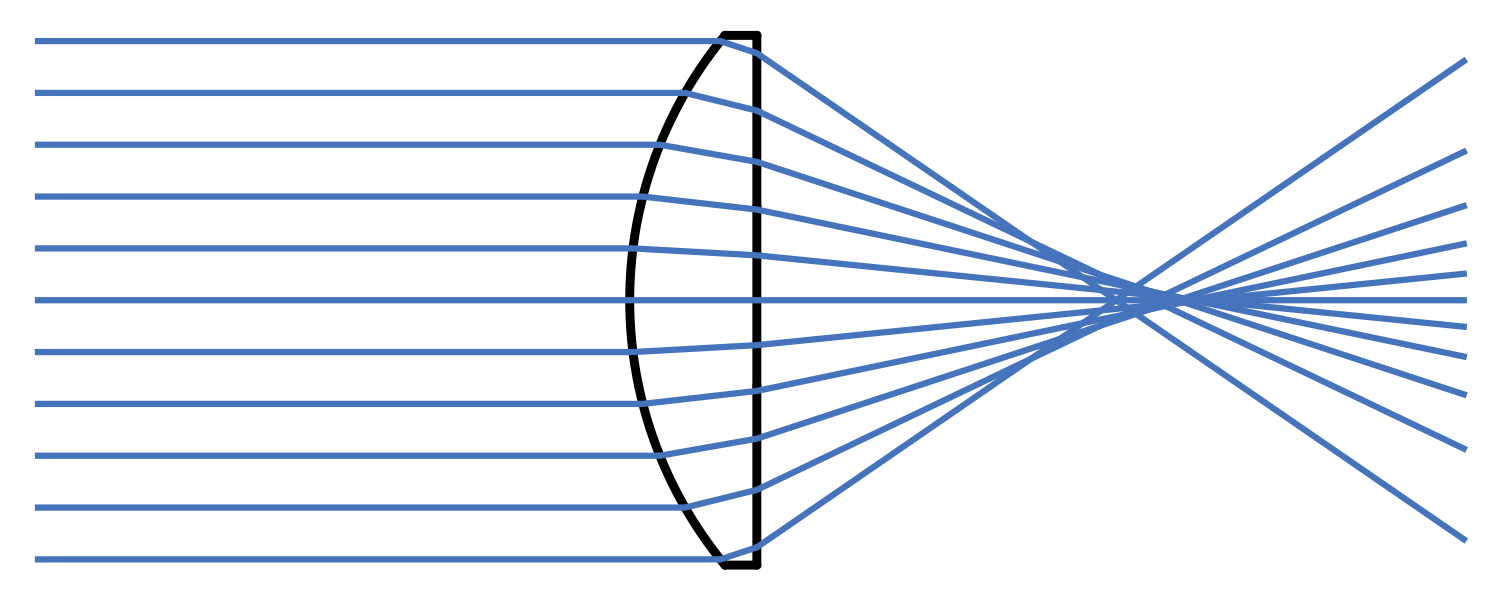
- 下图展示了实际平凸透镜(球面形状
而在理想情况下,薄透镜(thin lens) 能把光汇聚于一点,该点就是焦点(focal point)。
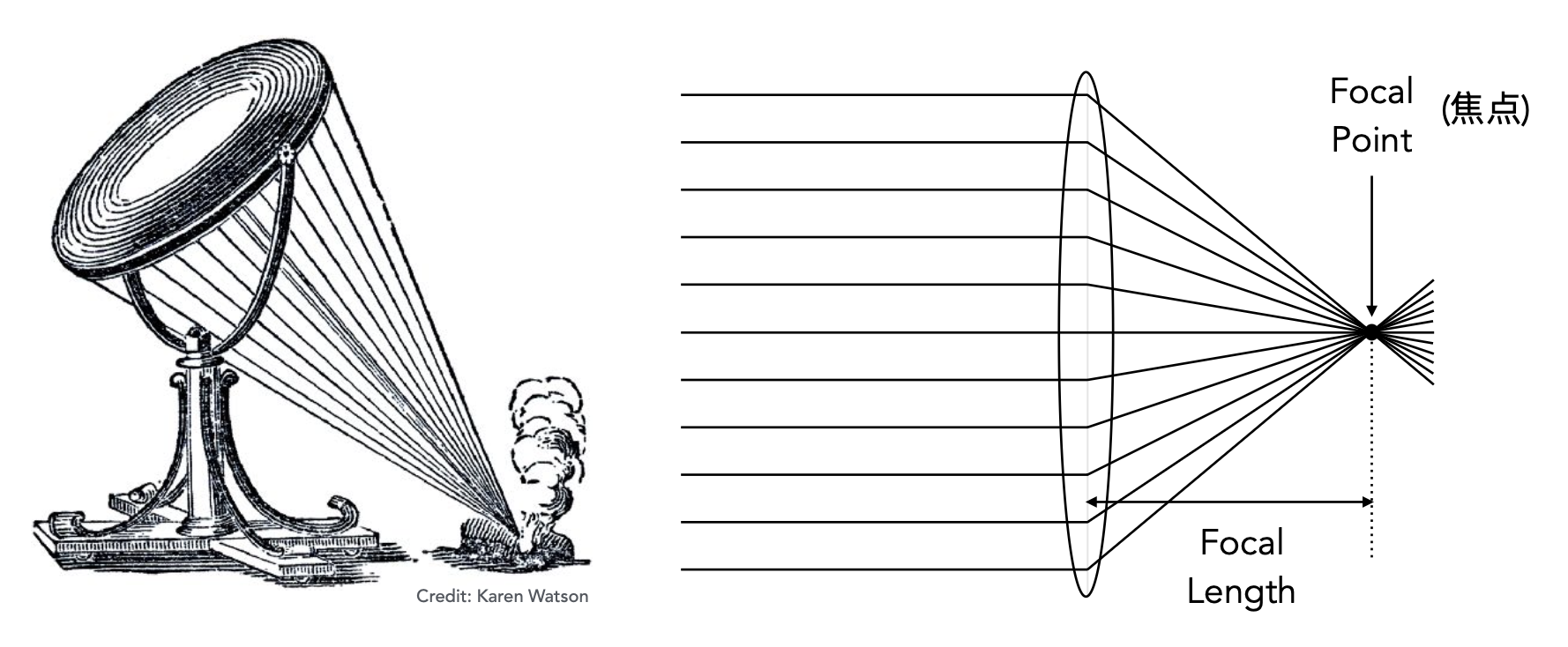
我们对这种理想透镜做以下假设:
- 所有经过透镜的平行光会穿过透镜焦点
- 所有来自焦点的光经透镜后会平行射出
- 可以任意改变焦距(实际上也确实可以)
薄透镜方程为: $$ \dfrac{1}{f} = \dfrac{1}{z_i} + \dfrac{1}{z_o} $$
其中 \(f, z_i, z_o\) 分别是焦距、像距和物距,如下面的光路图所示:
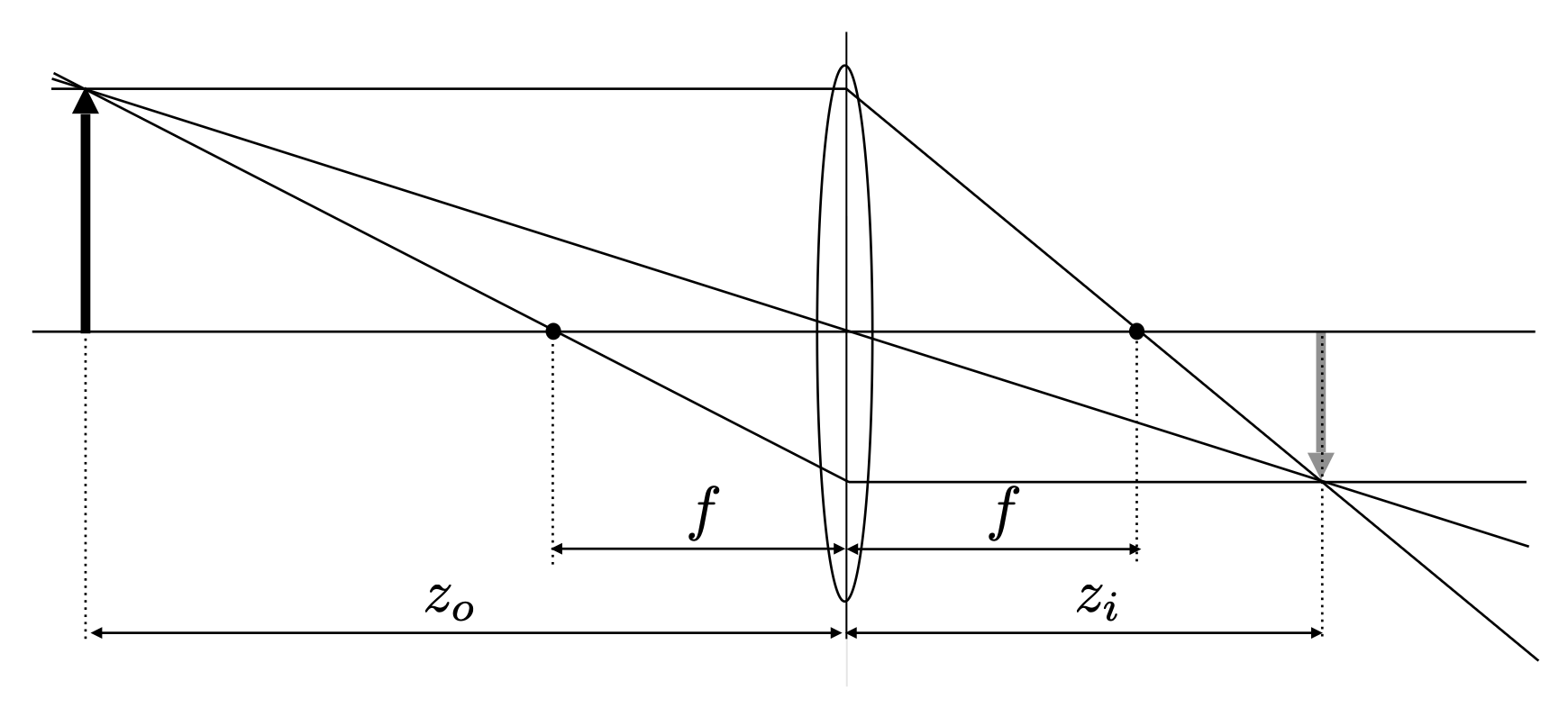
图中三条光线从上往下分别是平行光线(parallel ray)、主光线(chief ray)(这是假想的光线,研究成像时不考虑)和焦点光线(focal ray);而左右两侧的箭头分别表示物体(object) 和像(image)。
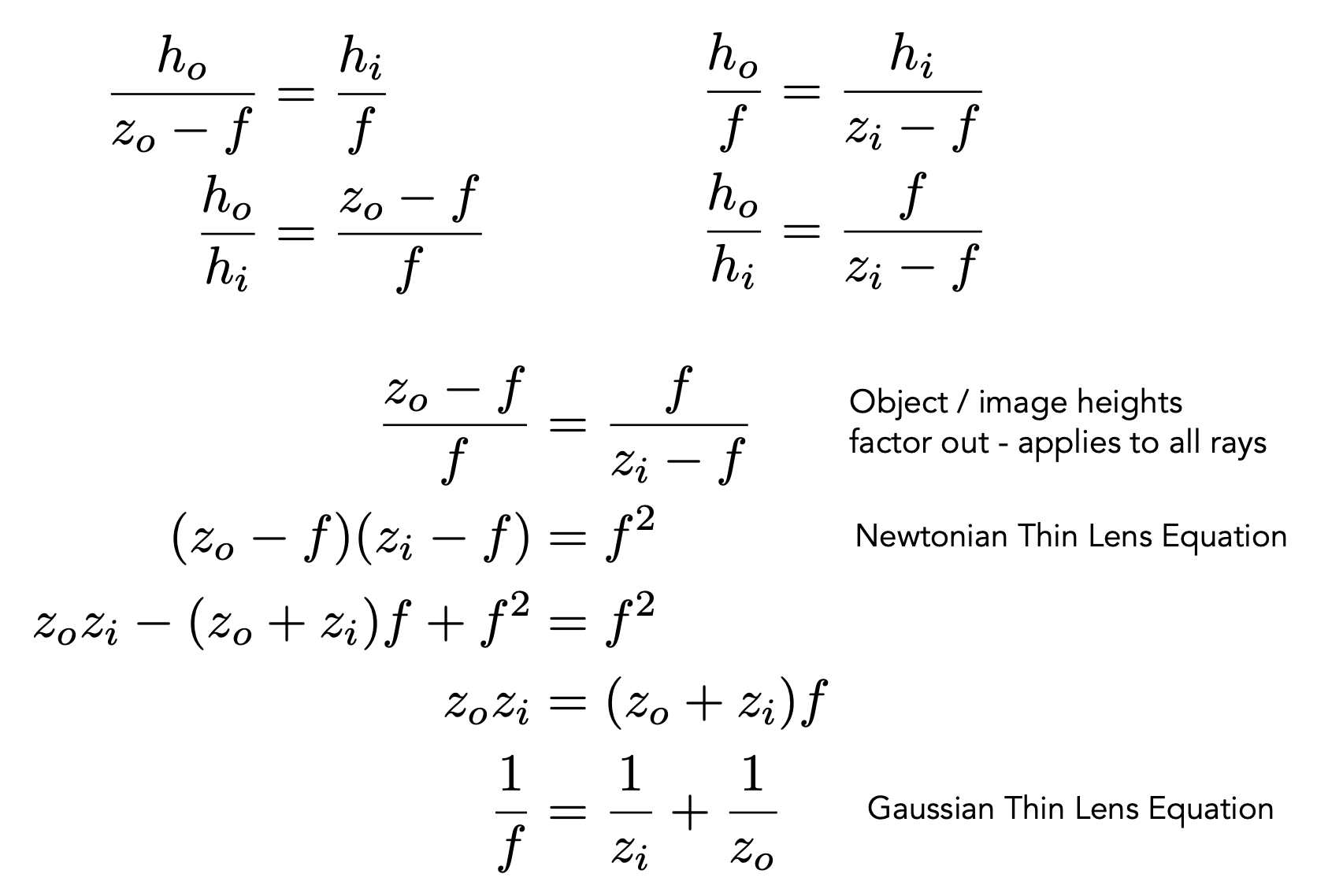
那么 \(z_i, z_o\) 之间有什么关系呢?通过上述光路图,我们可以找到两对相似三角形,从而联立方程:
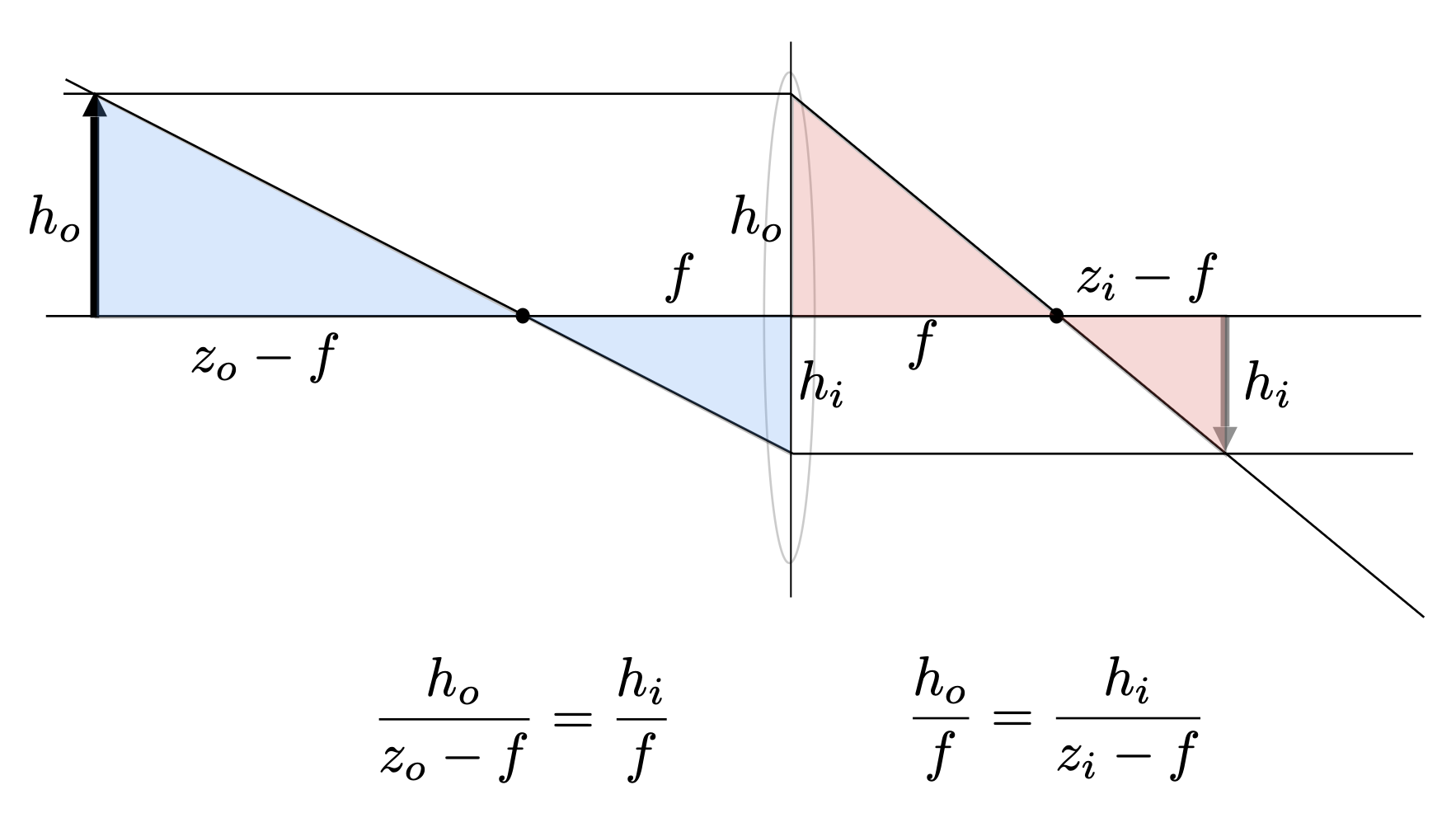
通过计算,我们推导出了前面给出的方程:
Demo
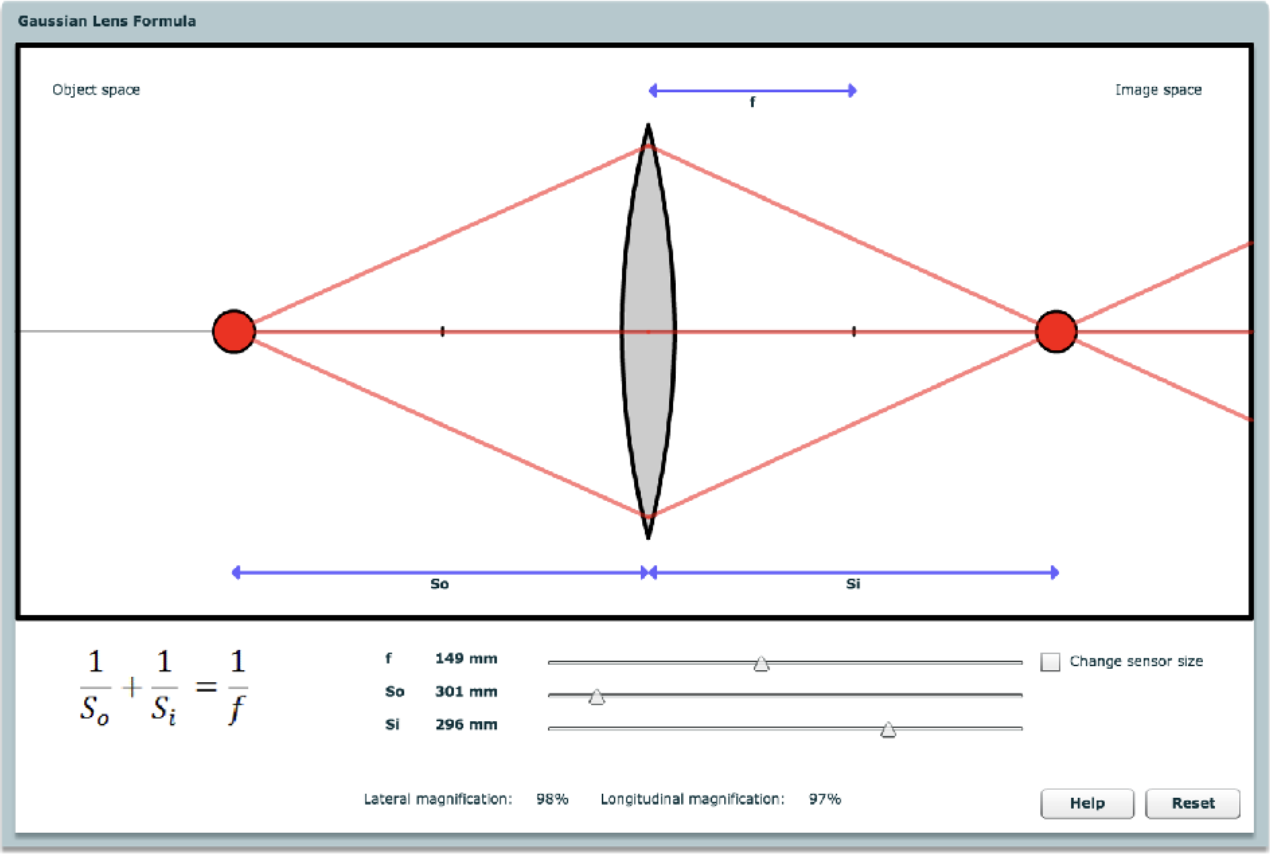
链接:http://graphics.stanford.edu/courses/cs178-10/applets/gaussian.html
注:这个 demo 是使用 Flash 做的,现在没有主流浏览器支持了(2020 年停止支持的,GAMS101 开课的时候应该还是支持的
) 。
Defocus Blur⚓︎
如下面光路图所示,如果传感器的位置并没有和物体成像位置贴合,这个成像点在传感器上就形成一块模糊的区域,叫做弥散圈(circle of confusion, CoC)。
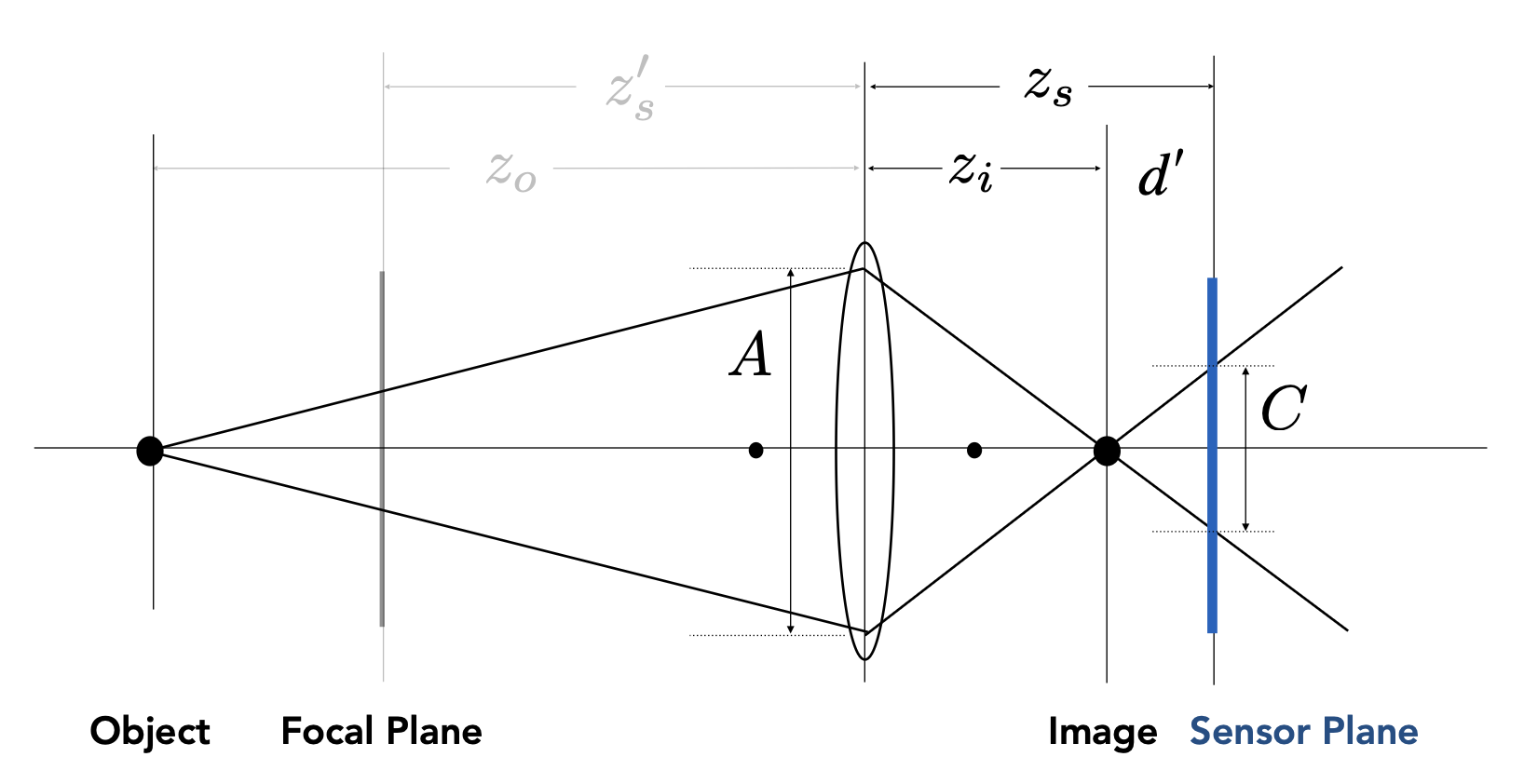
弥散圈的大小和光圈大小成正比。仍然利用相似三角形,可以得到: $$ \dfrac{C}{A} = \dfrac{d'}{z_i} = \dfrac{|z_s - z_i|}{z_i} $$
例子
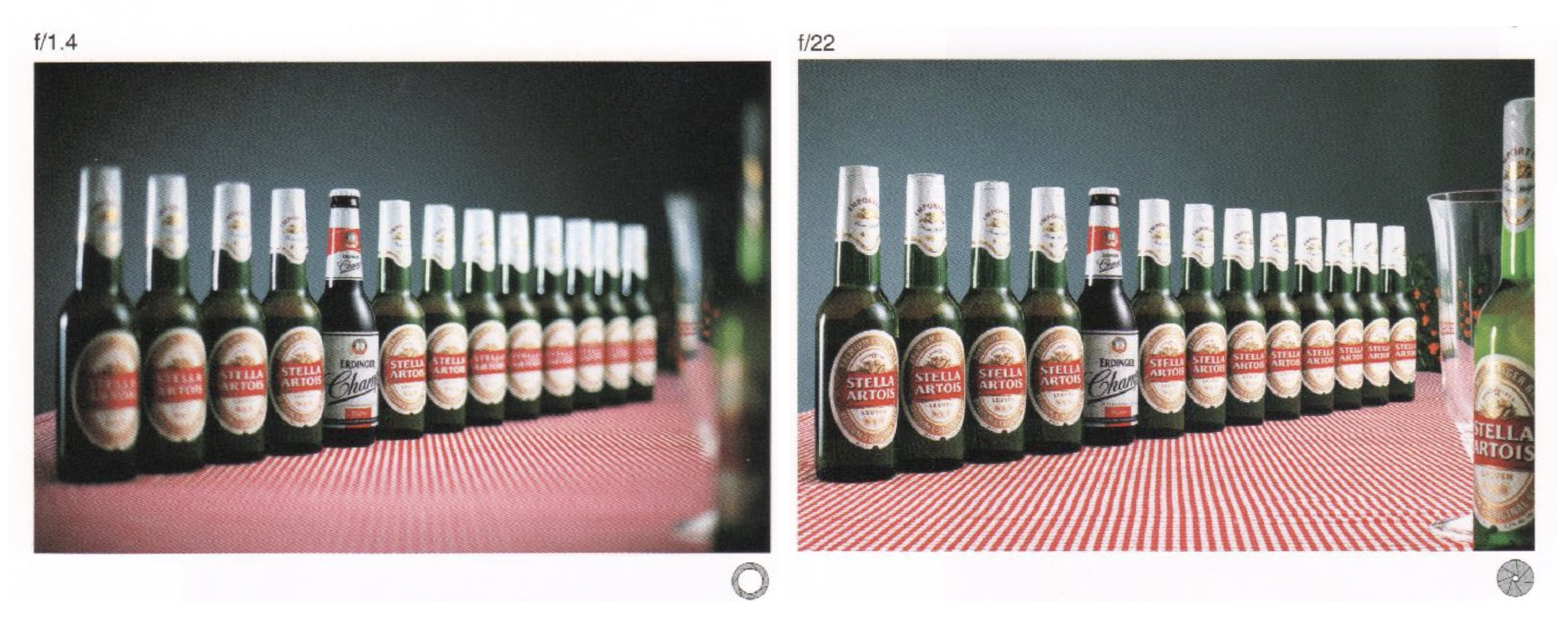
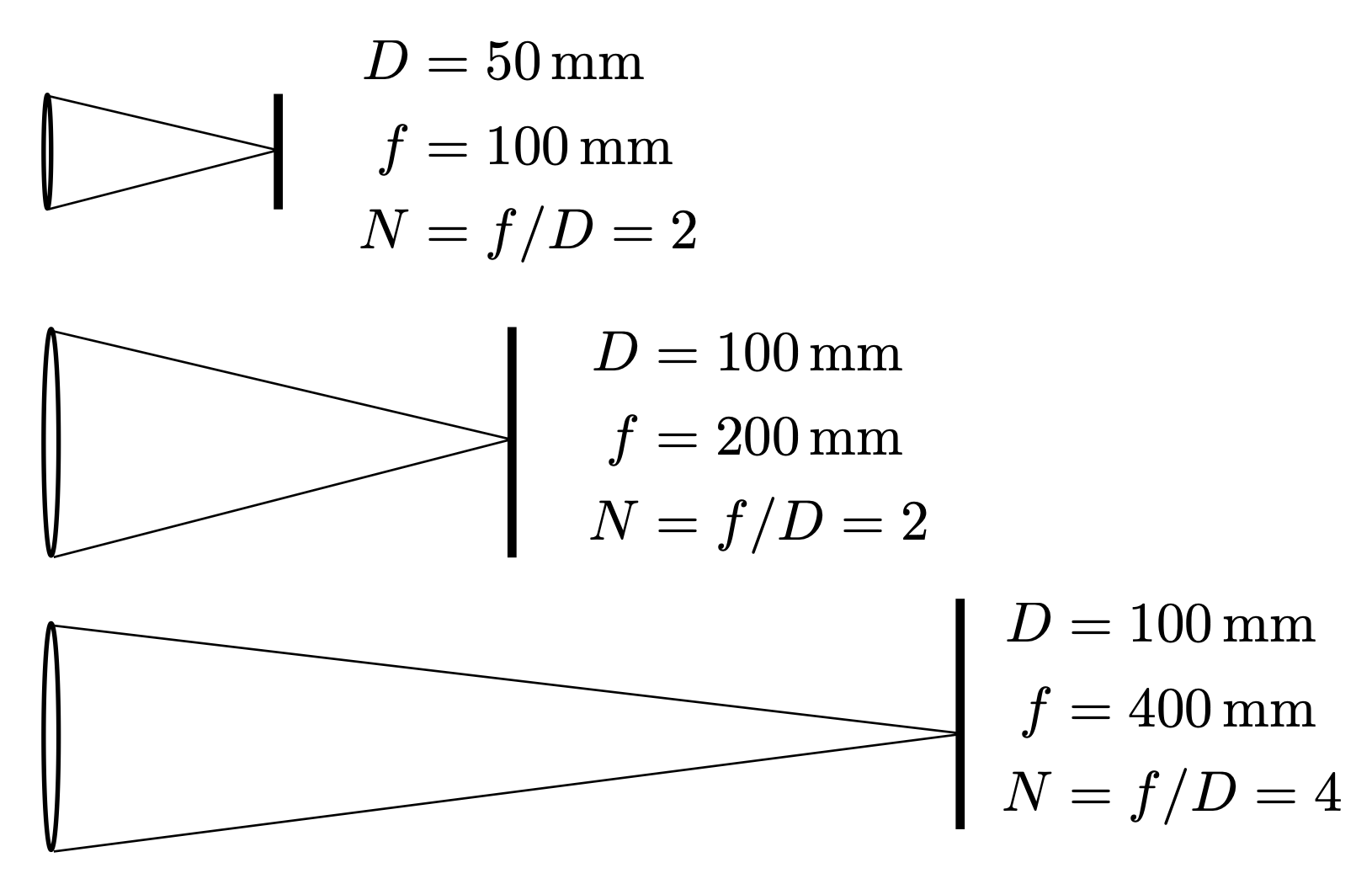
回过头来看 f 数——前面我们只给出一个非正式的理解,而它的实际定义是“焦距除以光圈直径”。
- 常见的 f 数:1.4, 2, 2.8, 4.0, 5.6, 8, 11, 16, 22, 32
- 假如 f 数为 2,那么有时我们会写作 f/2,这能反映绝对光圈直径(A)能通过焦距(f)除以相对光圈(N)计算出来
例子
所以弥散圈的大小和 f 数成反比,即 \(C = A \dfrac{|z_s - z_i|}{z_i} = \dfrac{f}{N} \dfrac{z_s - z_i}{z_i}\)
例子

Ray Tracing Ideal Thin Lenses⚓︎
我们可以将透镜聚焦应用于渲染中。
例子
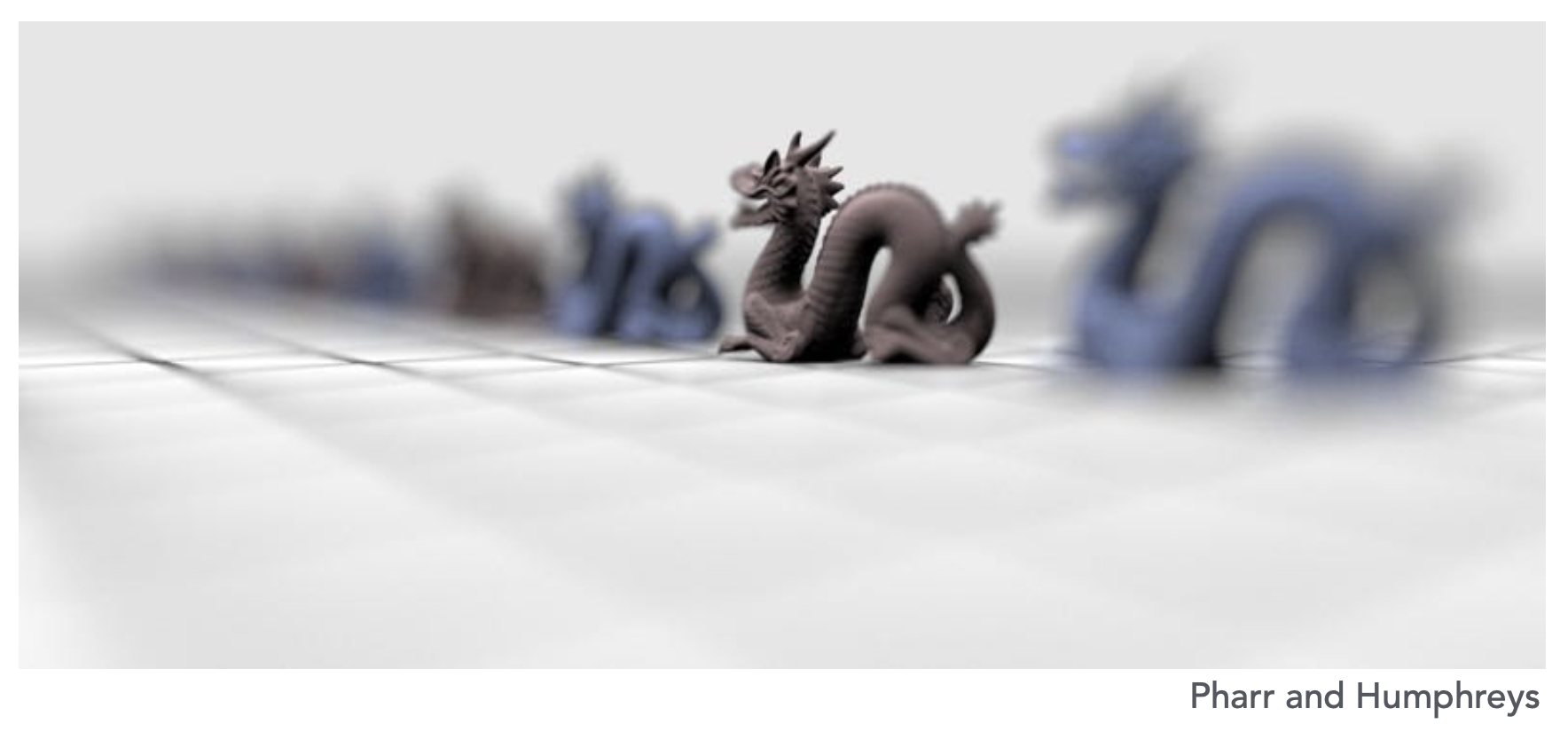
散焦模糊的光线追踪(薄透镜
-
(一种可能的)设置如下:
- 选择传感器大小,透镜焦距和光圈大小
- 选择感兴趣的对象深度 \(z_o\)
- 通过薄透镜方程计算相应的传感器深度 \(z_i\)
-
渲染:
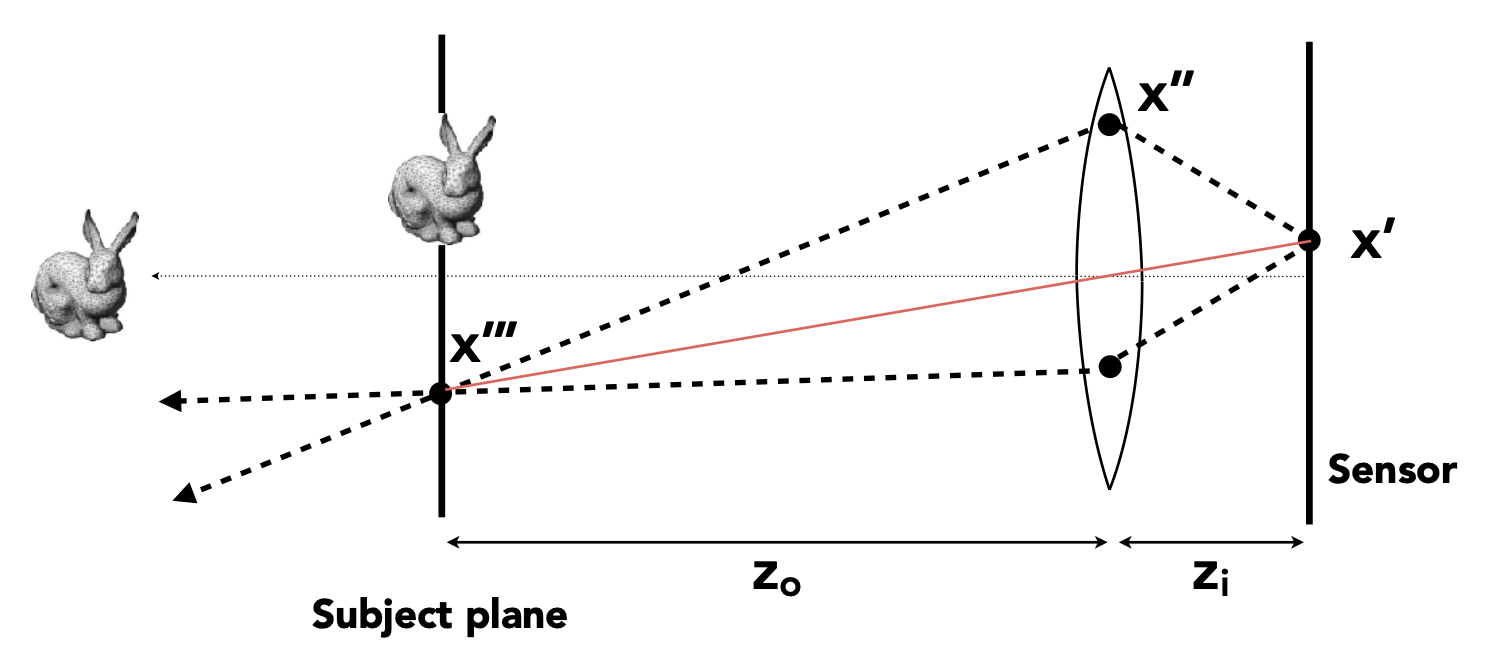
- 对传感器(实际上是胶片)上的每个像素 x'
- 在透镜平面上随机采样 x''
- 穿过透镜的光线会击中 x''',因为 x''' 在焦点上,考虑设置一条(和 x' 连接的)虚拟光线
- 评估 x'' -> x''' 的辐射率
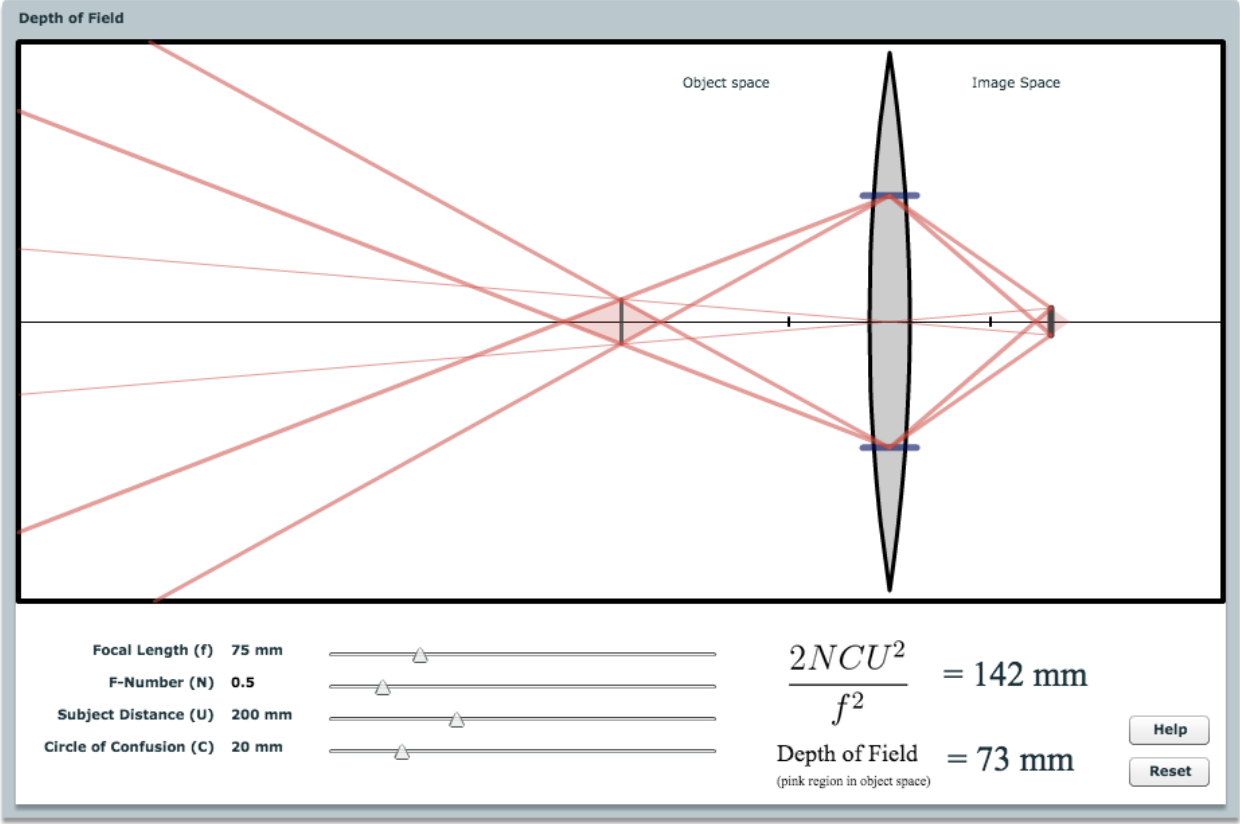
Depth of Field⚓︎
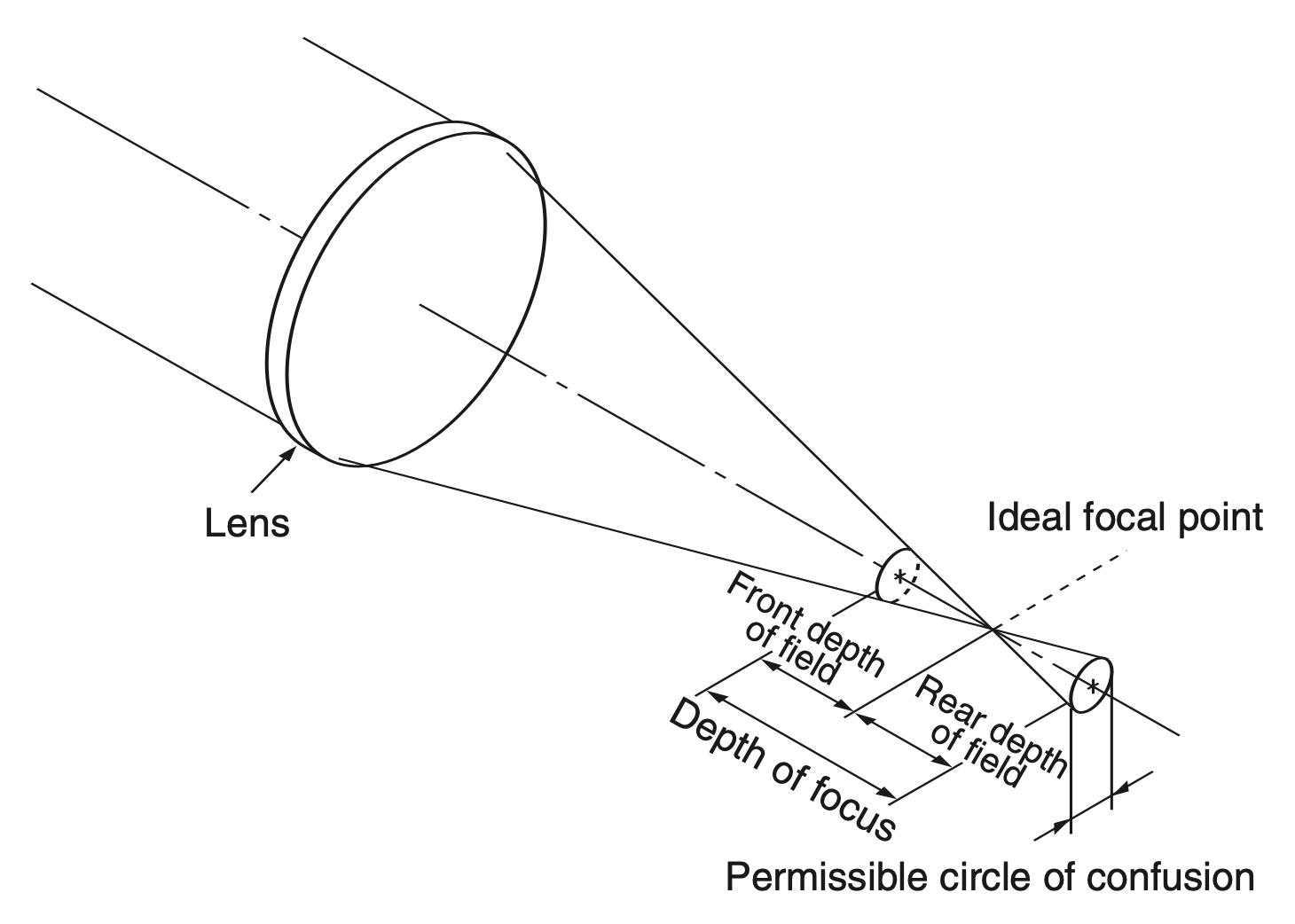
我们将弥散圆设定为图像平面上在特定观测条件下仍显示清晰 (sharp) 的最大允许模糊点。
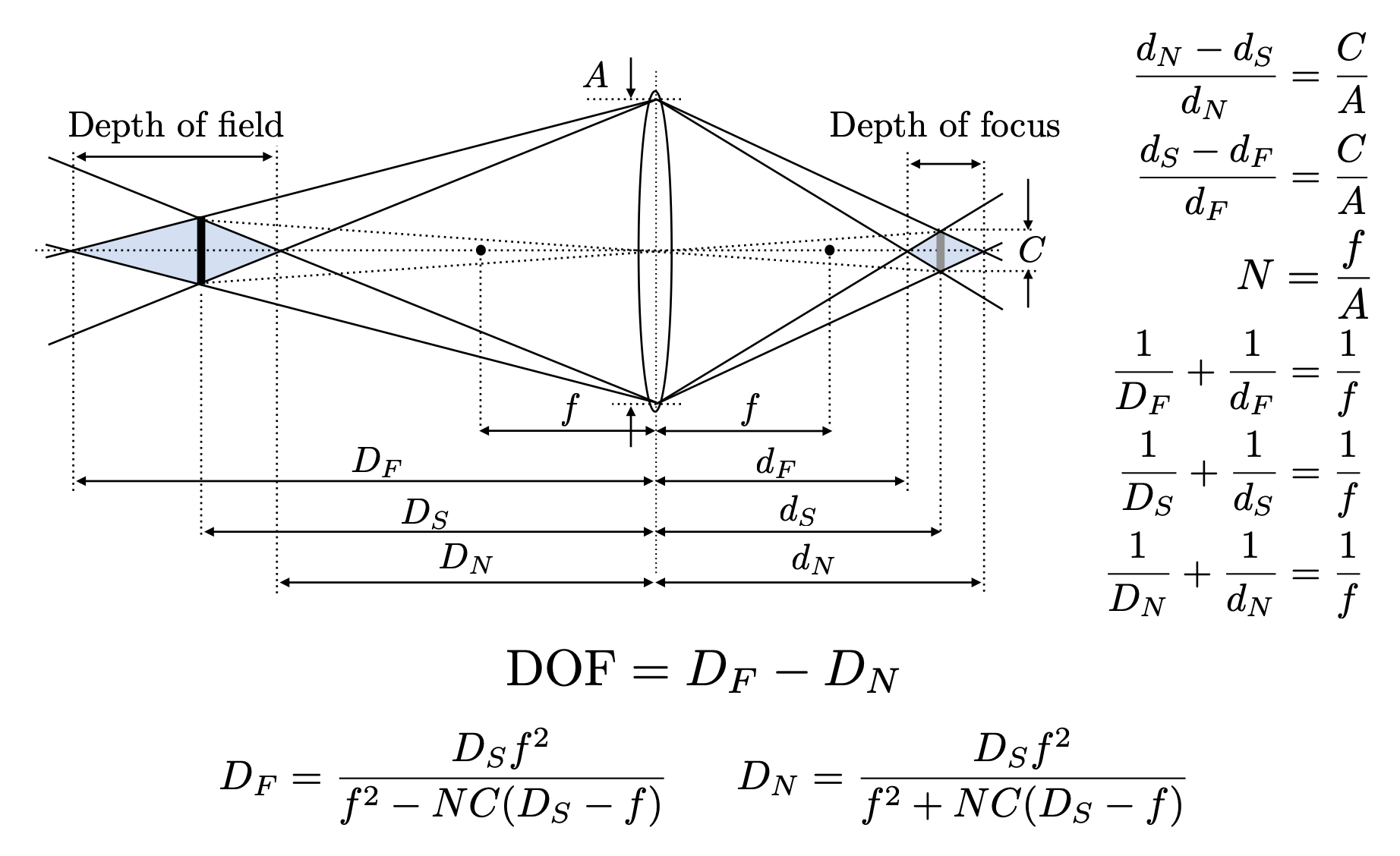
景深(depth of field) 的示意图如下:
景深的计算(依旧利用相似三角形,看起来繁琐,但算起来还是容易的
Light Fields⚓︎
注:有时读者会看到 Lumigraph 一词,它的意思和 Light Field 是一样的。
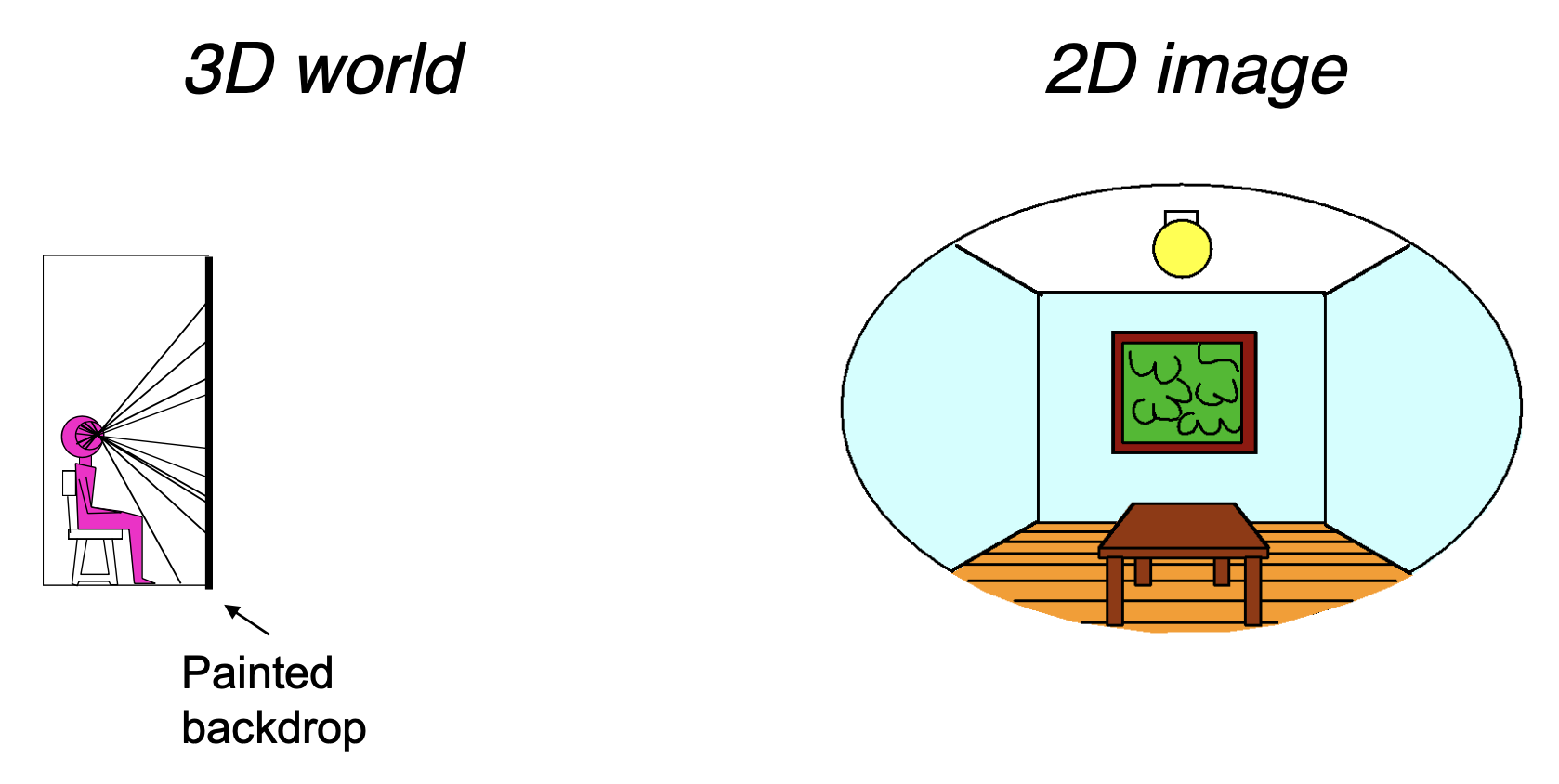
假如有一人端坐在房间内并面对窗户,ta 可能会看到以下画面:
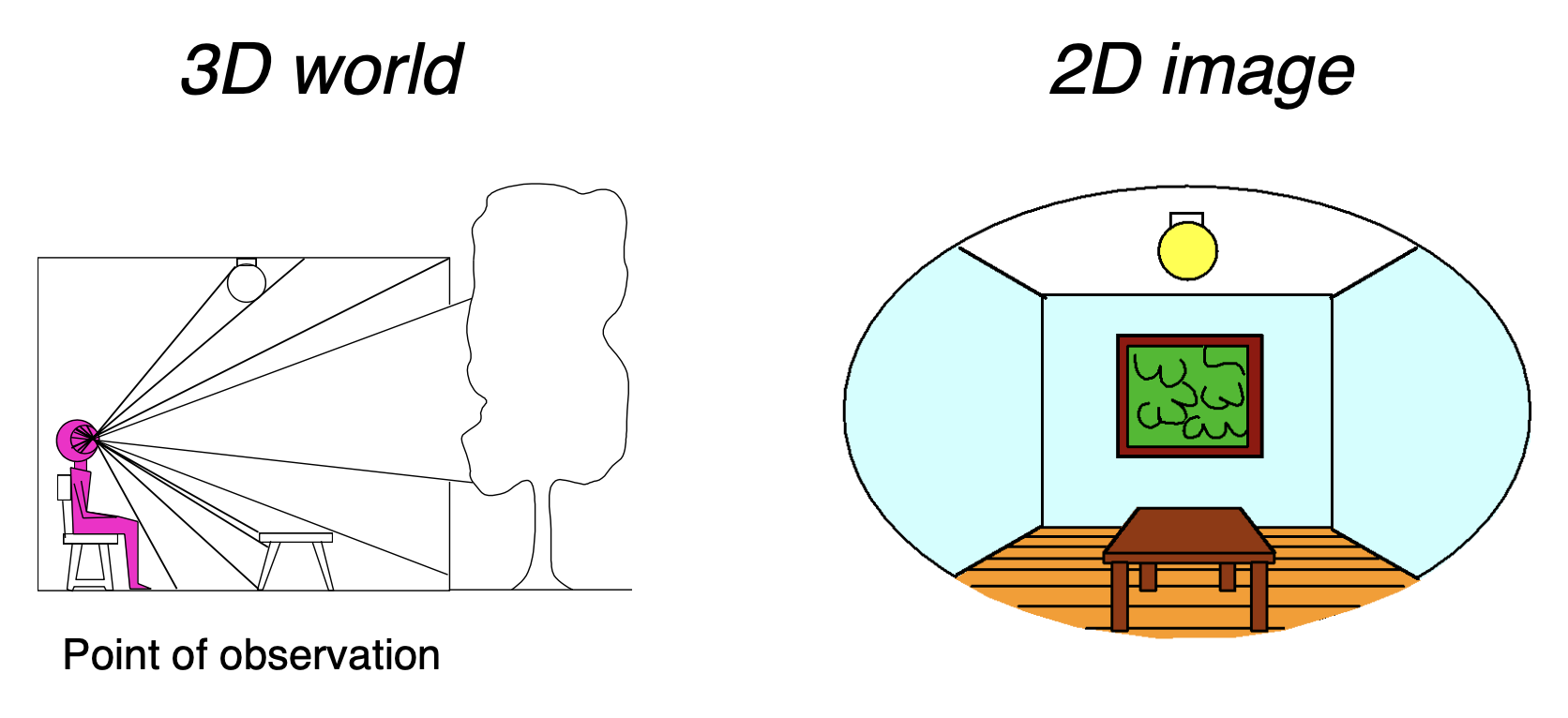
假如将一块和 ta 看到的画面几乎一模一样的屏幕放在 ta 的眼前,对 ta 来说,看到的画面几乎和原来一模一样。
下面将以数学形式来描述这个现象——我们可以用一个全光函数(plenoptic function) 来描述我们所能看见的全部东西。让我们从一个静止的人开始,尝试参数化他所能看到的一切。
-
灰度快照
: (某一方向上 \((\theta, \varphi)\))光强为 \(P(\theta, \varphi)\)
- 单个视角
- 单个时间
- 可见光谱的波长均值(因而呈现的是灰色)
- 也可以记作 \(P(x, y)\),但实际应用中球坐标更好些
- 彩色快照:光强为 \(P(\theta, \varphi, \lambda)\)

- 单个视角
- 单个时间
- 但是关于波长的函数(于是有了颜色)
- 电影:光强为 \(P(\theta, \varphi, \lambda, t)\)
- 单个视角
- 考虑时间变化
- 关于波长的函数)
- 全息电影:光强为 \(P(\theta, \varphi, \lambda, t, V_x, V_y, V_z)\)
- 任意视角
- 考虑时间变化
- 关于波长的函数
综上,完整的全光函数公式就是 \(P(\theta, \varphi, \lambda, t, V_x, V_y, V_z)\)。
- 它能重构任何视角、任何时刻、任何位置、任何波长看到的东西
- 并且包含了每张照片、每部影片、每个人所看到的东西——它能完全捕捉视觉下的现实!
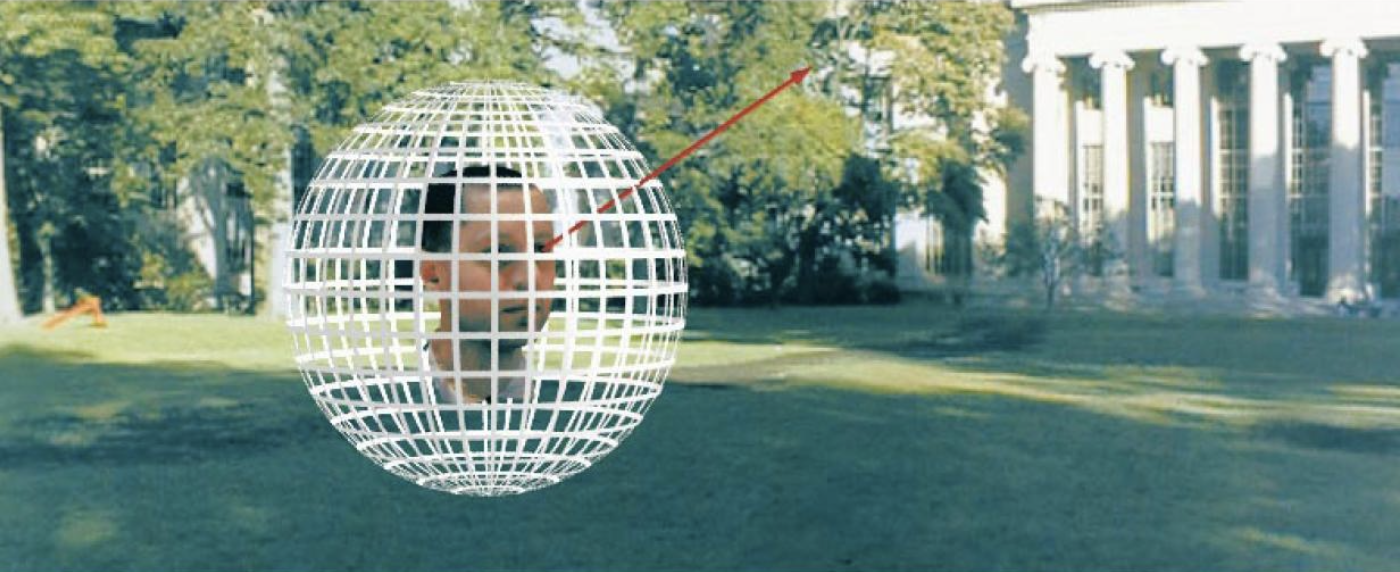
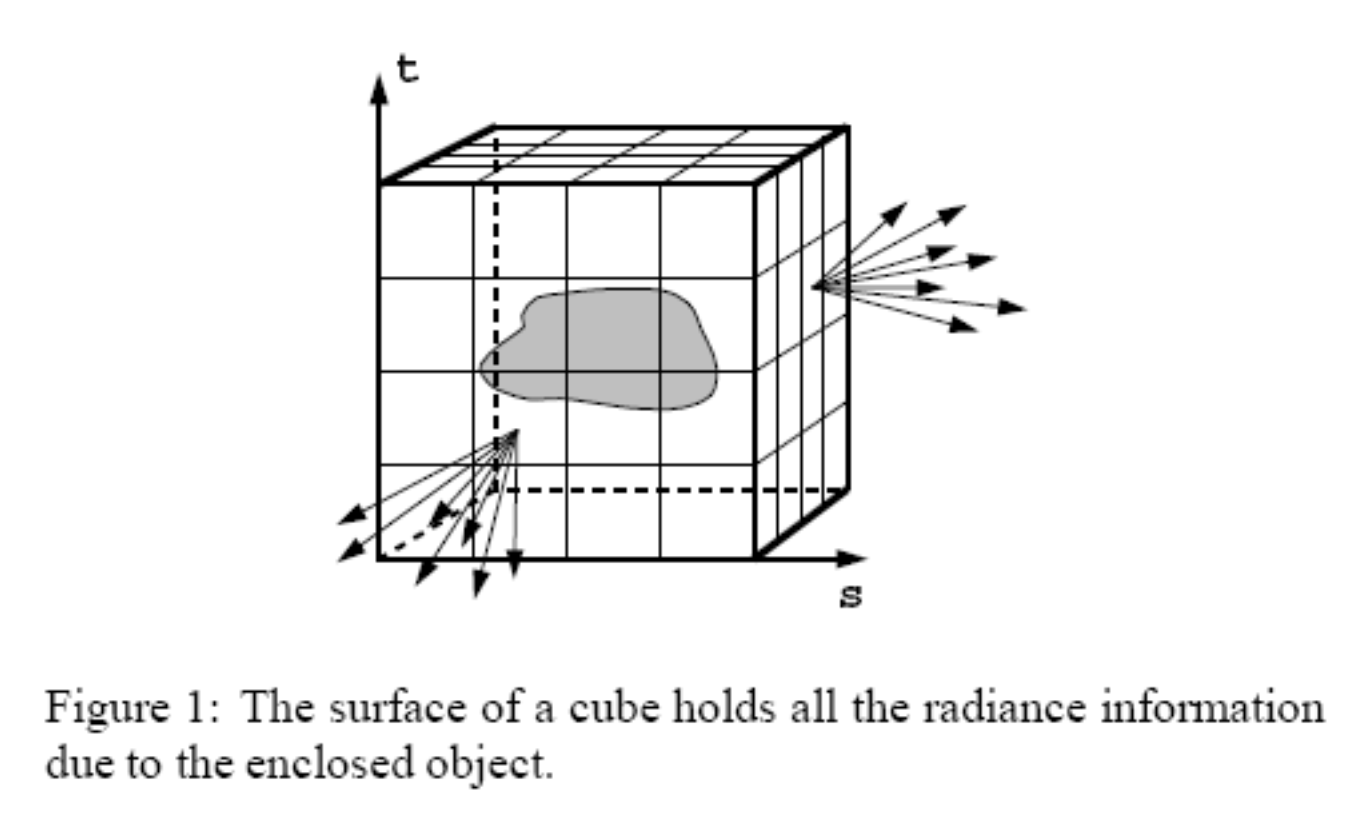
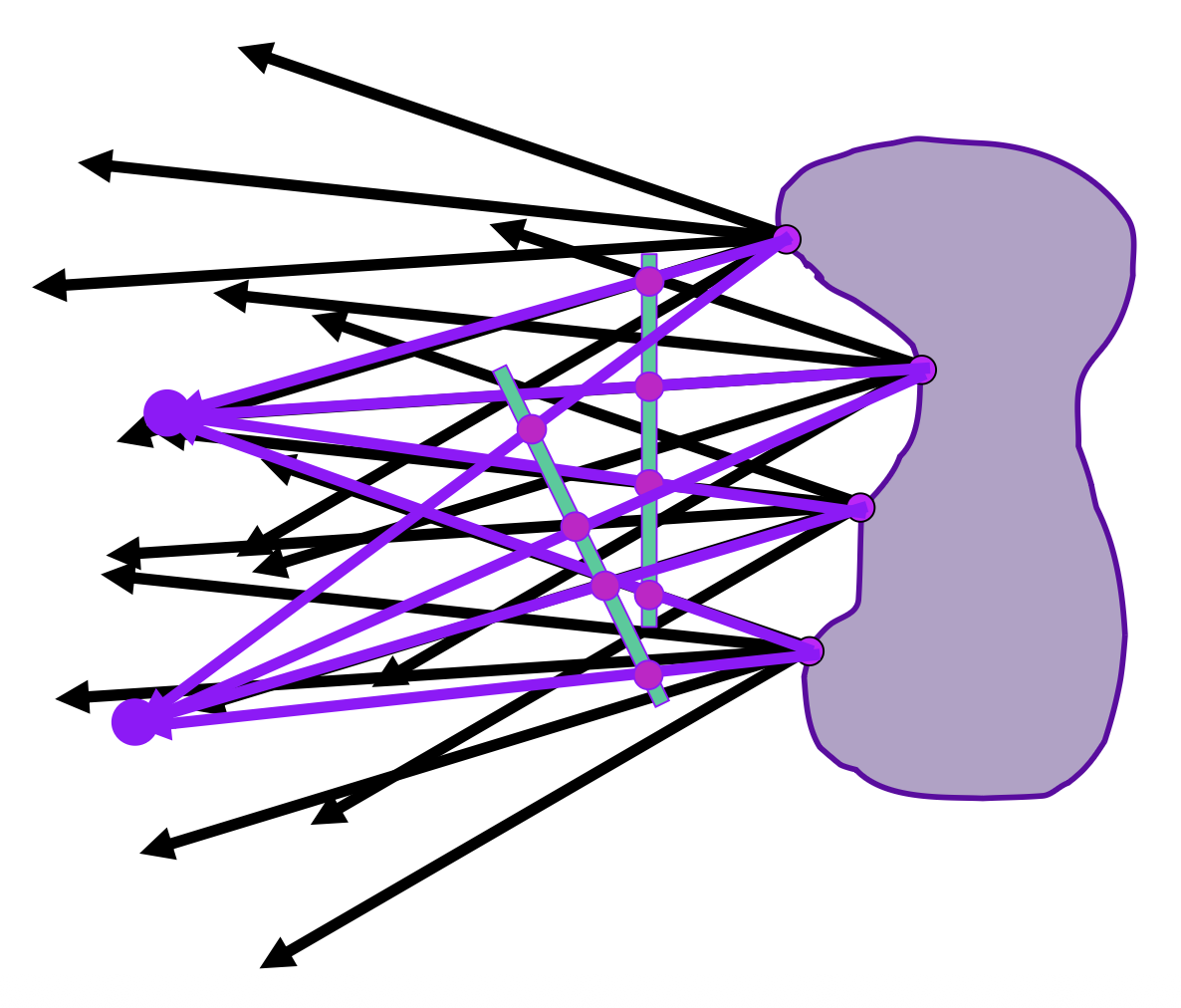
对全息函数采样(顶层视角,以二维形式呈现
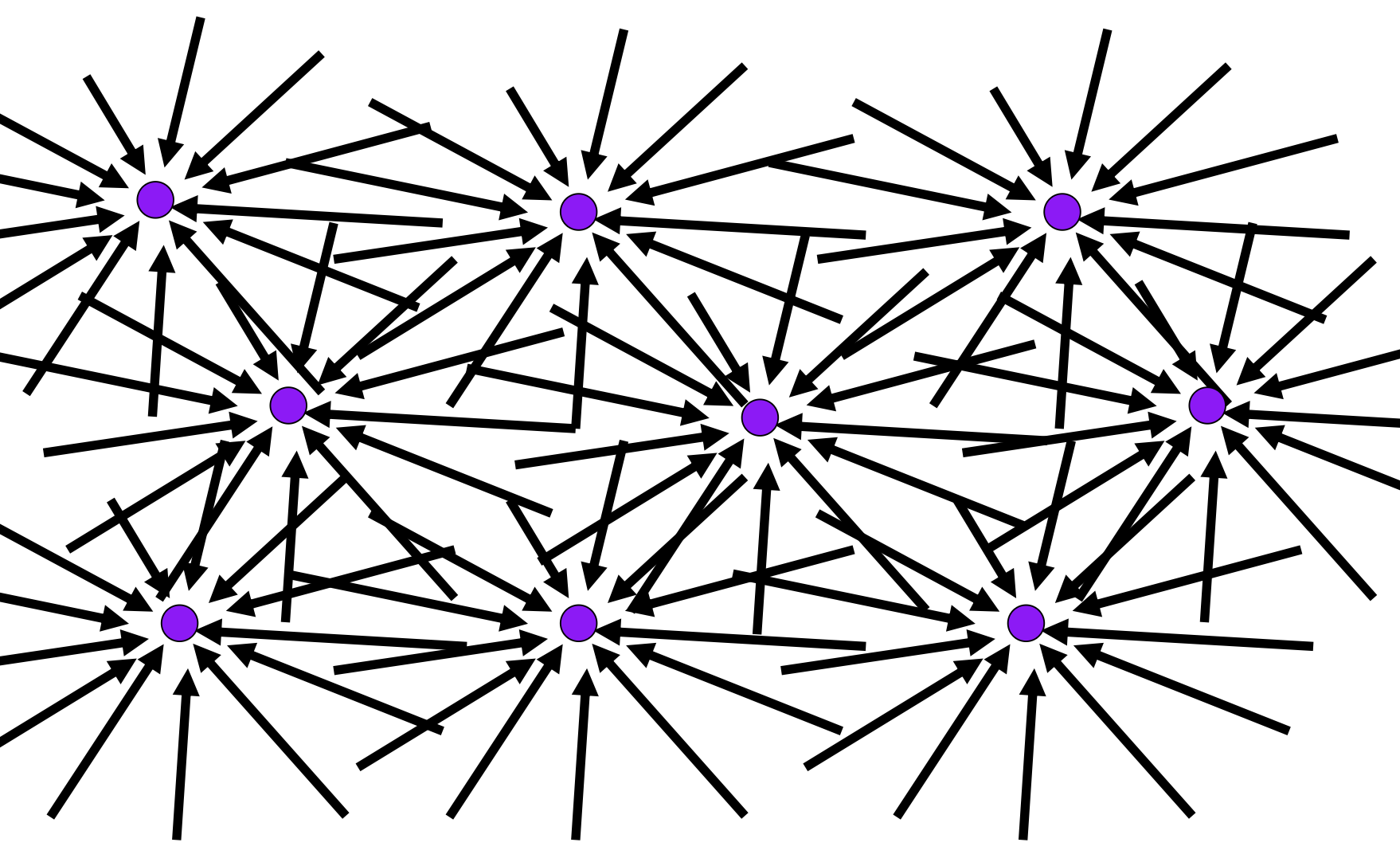
图中的一个个箭头代表的是光线,作为光场的组成部分(因此光场实际上是全光函数的一部分
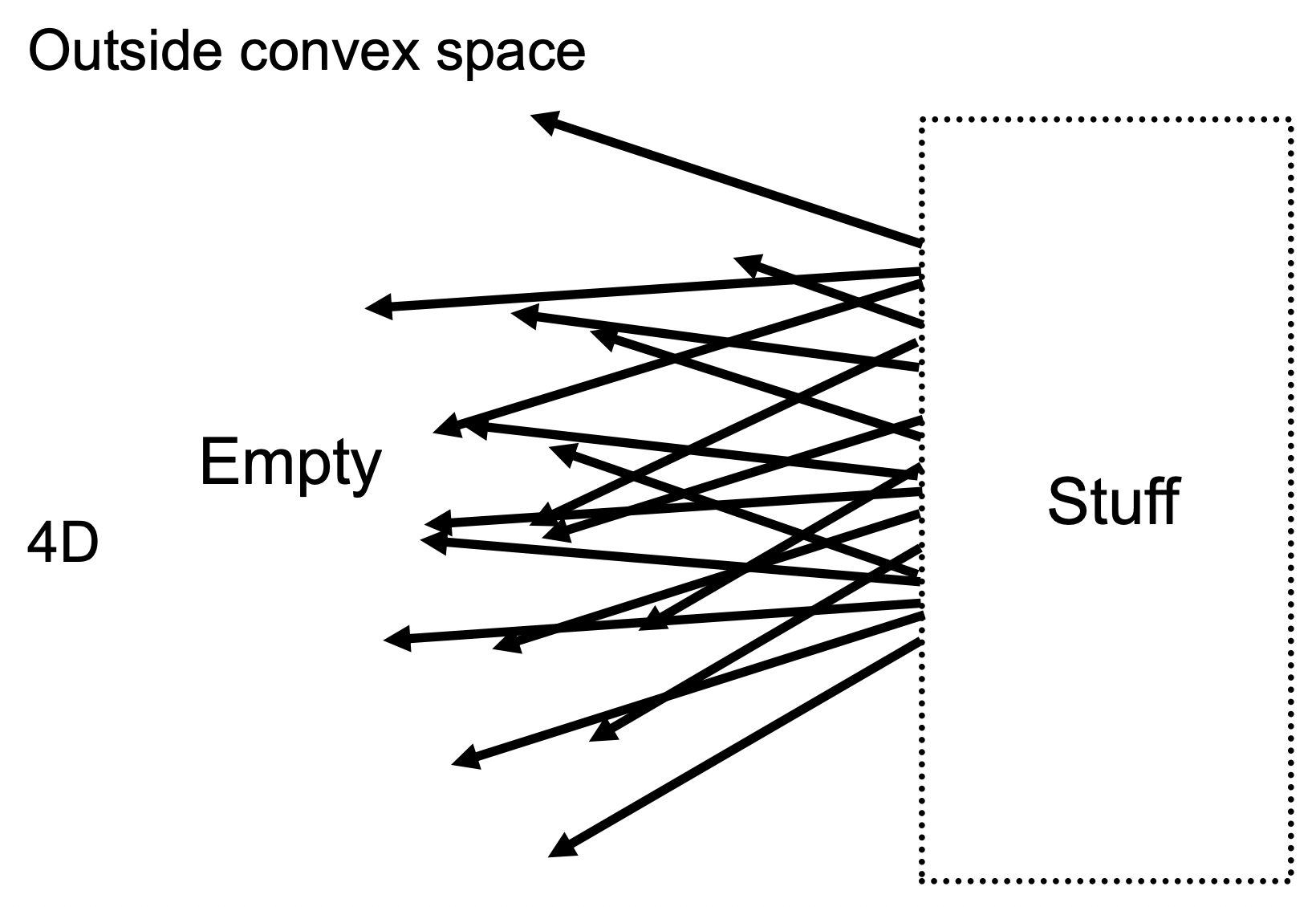
-
5D 函数(3D 位置 + 2D 方向
) :\(P(\theta, \varphi, V_x, V_y, V_z)\)
-
4D 函数(2D 位置 + 2D 方向,且要求非色散介质 (non-dispersive medium)
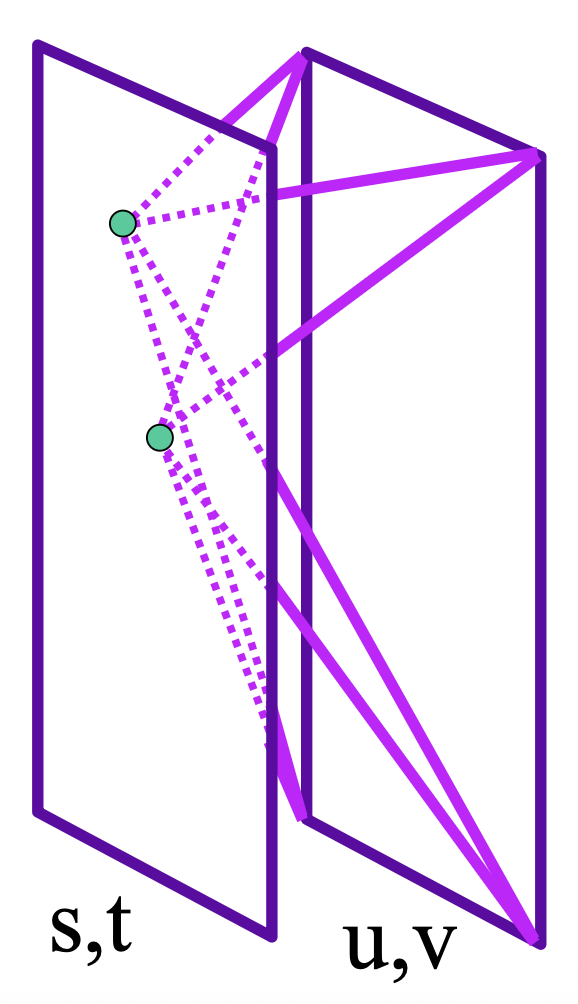
) :两点确定一条直线
对于一个物体,我们不需要知道它具体长什么形状(可看作一个黑盒
前面提到了可以用两点确定一条光线。同理,对于物体上发出的众多光线,我们可以用两个平面参数化(2 planes parameterization) 的方式来确定这些光线。我们一般用 \((s, t)\) 和 \((u, v)\) 分别指代远离物体和靠近物体两个平面上的坐标。
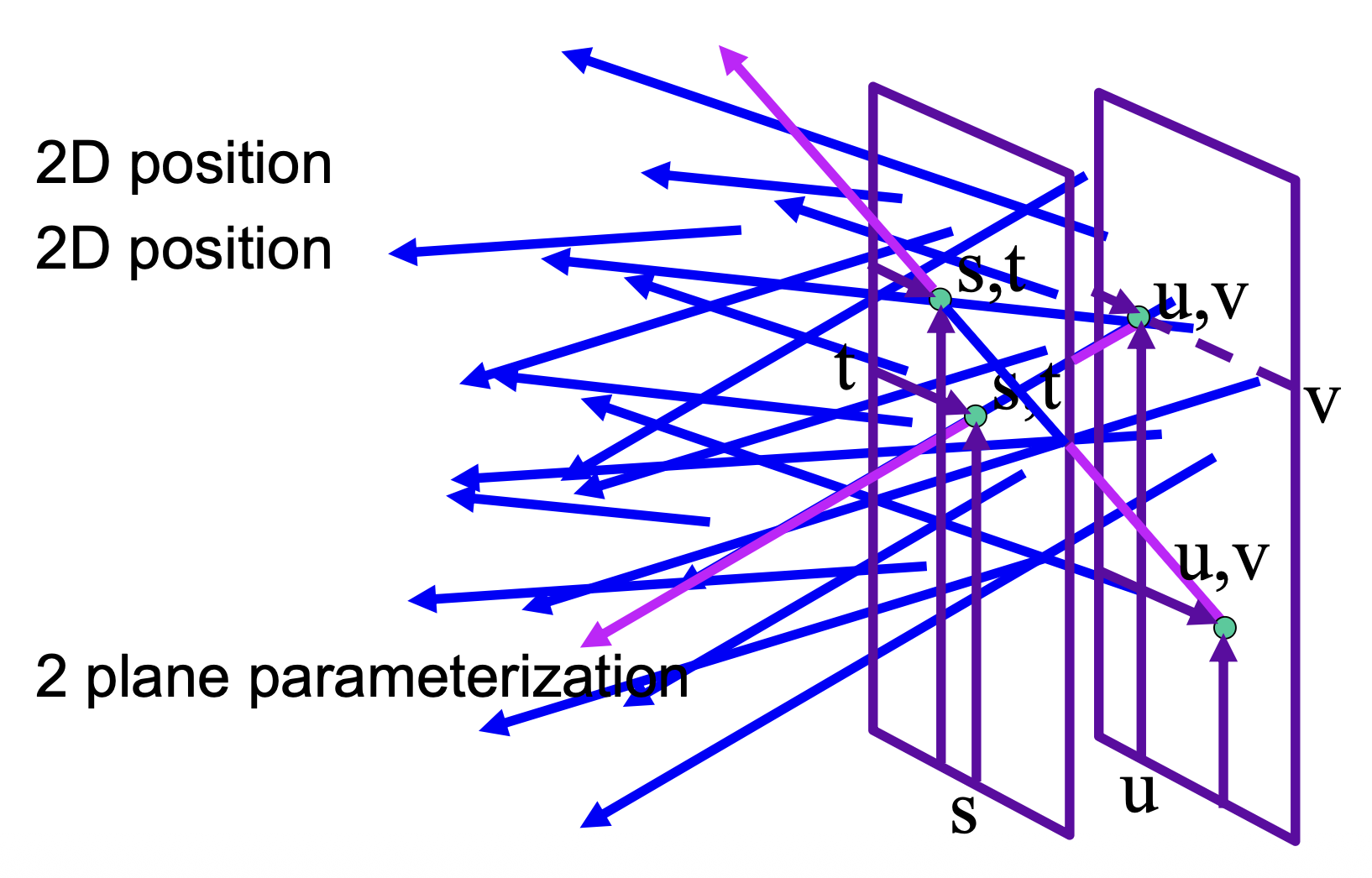
保持 \((s, t)\) 不动并移动 \((u, v)\),我们就能得到(某一视角下)关于物体的图像了。
例子
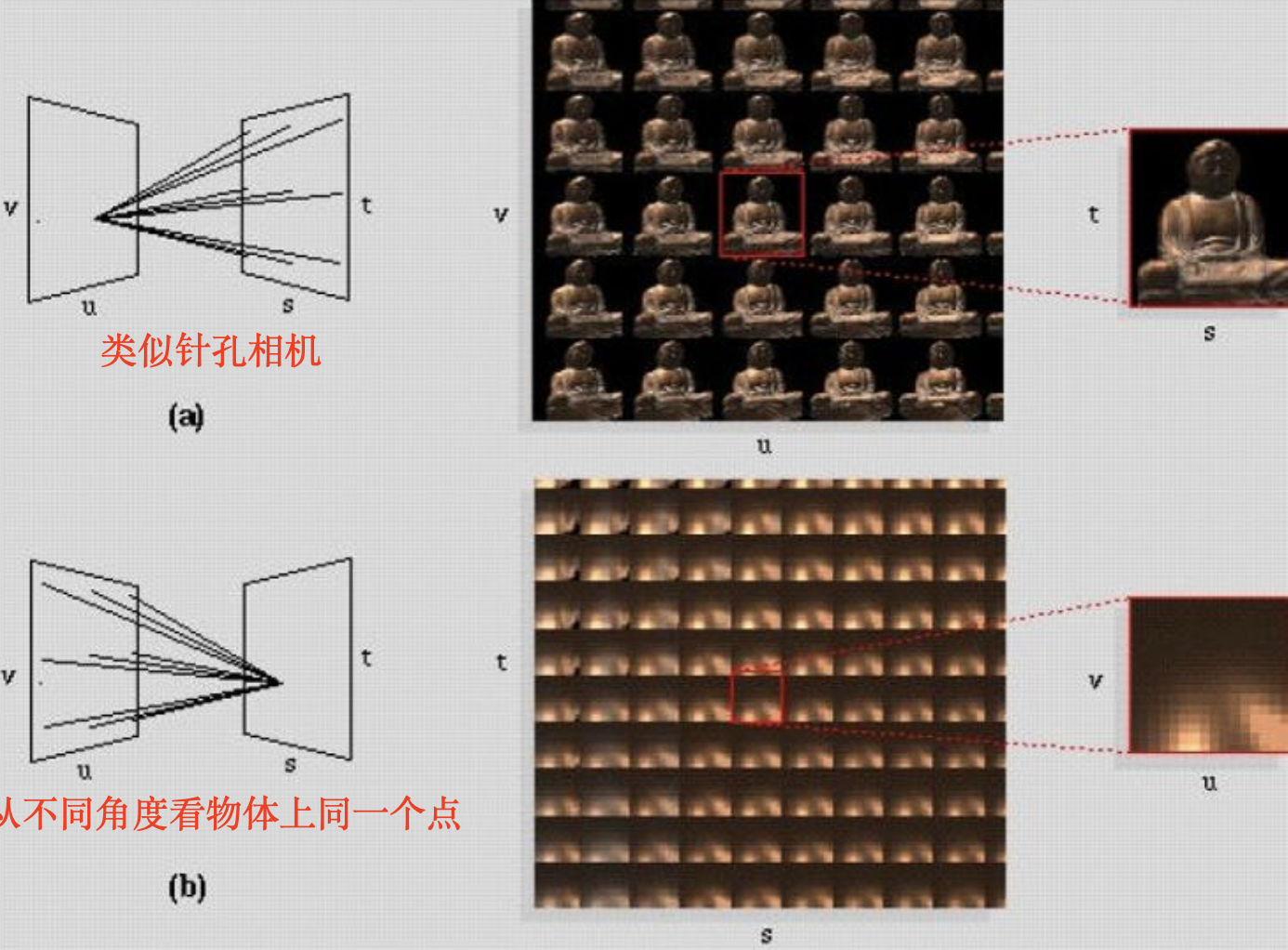
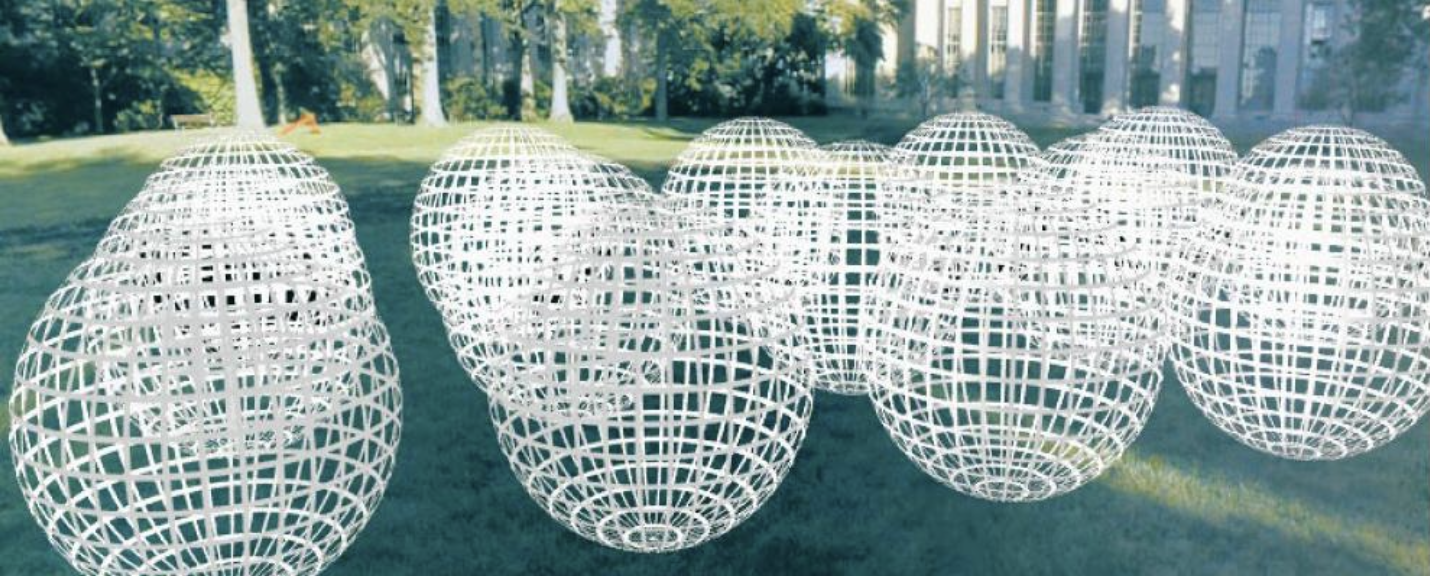
上述图像可以用以下这个相机阵列拍摄(经费爆炸

这种相机阵列属于一种透镜阵列(lenslets),用于捕捉空间上空间多路 (spatially-multiplexed) 光场。苍蝇的复眼也是一种透镜阵列。
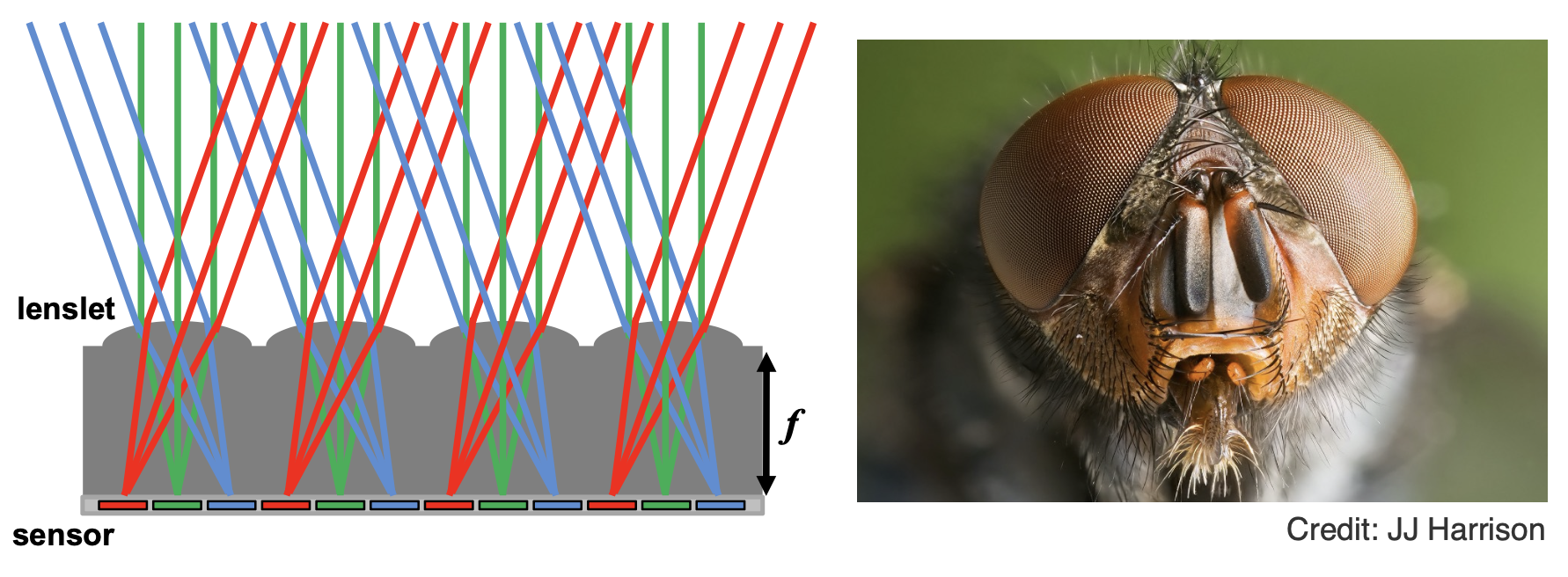
需要注意的是,透镜阵列需要做好空间分辨率和角分辨率的权衡,因为两者属于此消彼长的关系:空间分辨率越高,角分辨率越低,反之亦然。
Light Field Camera⚓︎
吴义仁 (Ren Ng) 教授发明了光场相机(light field camera),并且创办了制造光场相机的公司 Lytro。光场相机具有以下特点:
- 微透镜设计
- 最重要的功能——计算重对焦(computational refocus),可以做到在拍好照片后“虚拟地”调整焦距和光圈大小,就像重新拍了一张照片一样

例子






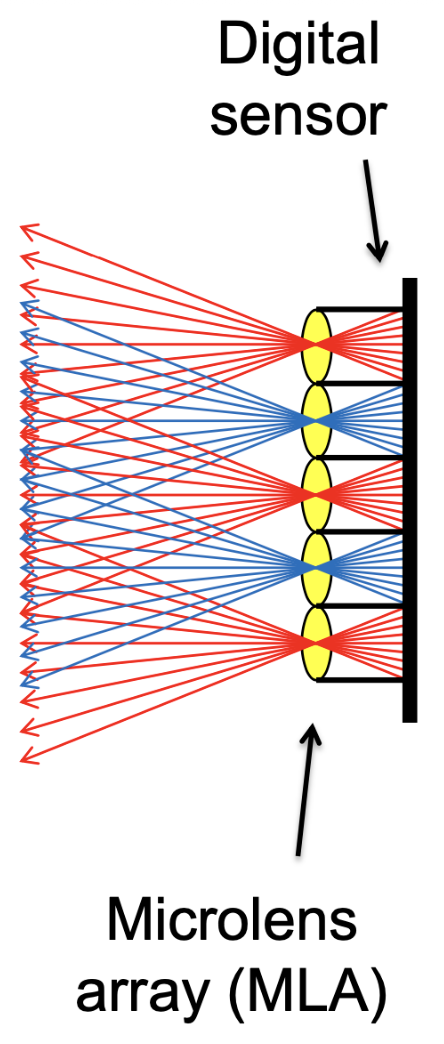
理解光场相机:
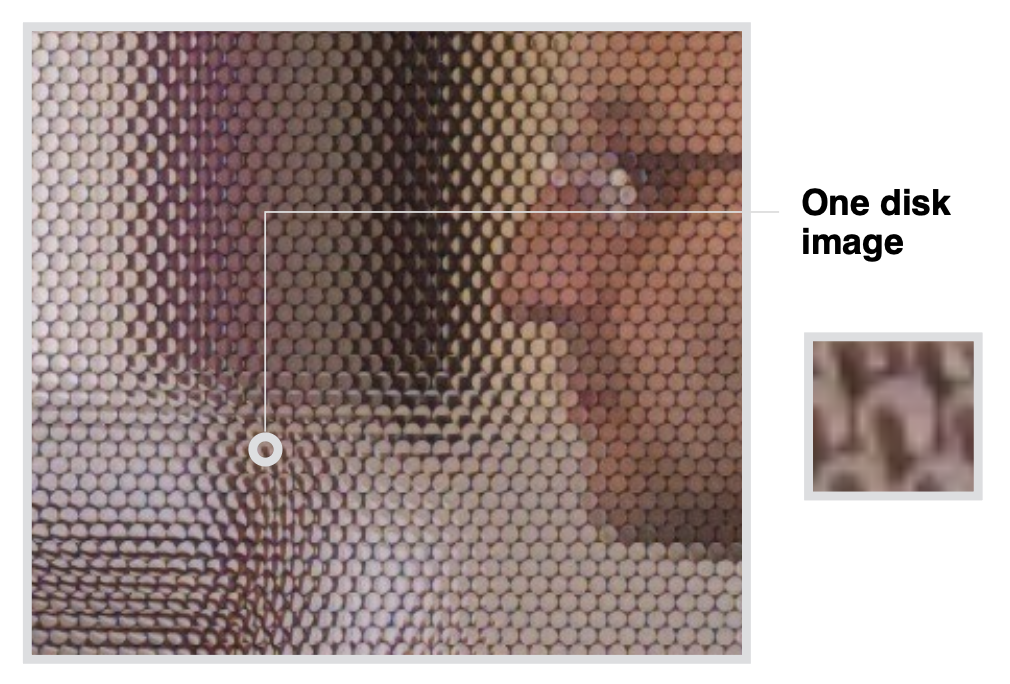
- 从原来记录一个像素到记录一“块”像素(对应一个微透镜(microlens)
) ,记录不同方向的光- 一块像素的平均值就是普通相机的拍摄结果
-
凑近看用光场相机拍摄的照片:
那么如何从光场照片中得到常规照片呢?
- 一种简单的情况:总是选择每个像素块中最底下的像素
- 或者选择中间 / 顶上的像素
- 本质上就是“移动相机”
计算重对焦也是类似的原理:虚拟地改变焦距,相应地选取重对焦光线的方向。
总而言之,之所以光场相机能够实现这样的功能,是因为光场能够记录所有的画面信息。
光场相机的问题
- 空间分辨率不足:由于需要同时对空间和方向采样,这意味着一个像素块想要采集更多方向信息,需要使用更大的微透镜,但总体大小有限,那么微透镜数量就会减少,空间分辨率也随之降低
- 成本高昂:微透镜的设计很复杂
- CG 是一门 trade-off 的学科
评论区