Model Fitting and Optimization⚓︎
约 1815 个字 5 行代码 预计阅读时间 9 分钟
Optimization⚓︎
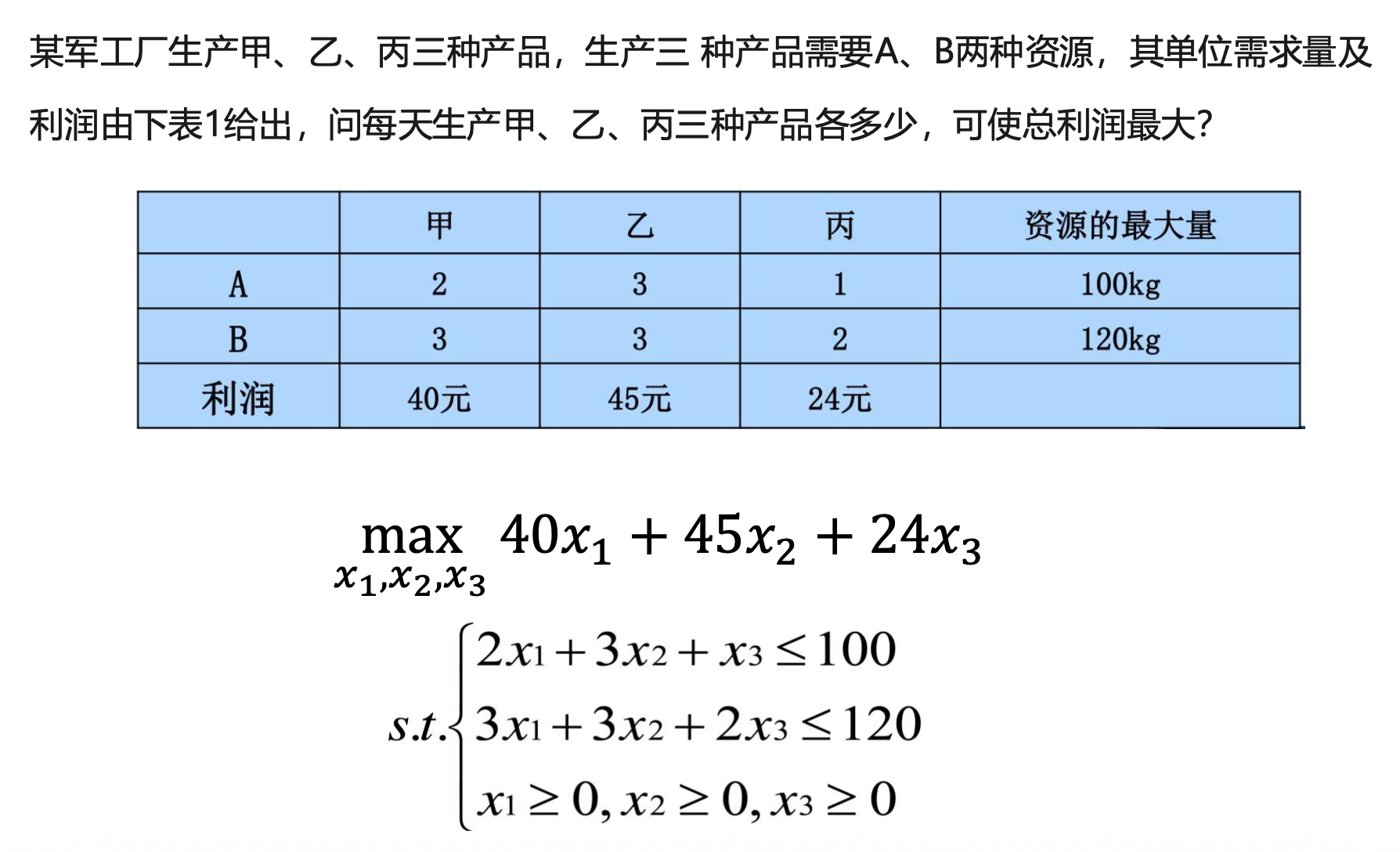
例子
- \(x \in \mathbb{R}^n\) 是被选中的(向量)变量
- \(f_0\) 是要被最小化的目标函数
- \(f_1, \dots, f_m\) 是不等式约束函数
- \(g_1, \dots, g_p\) 是等式约束函数
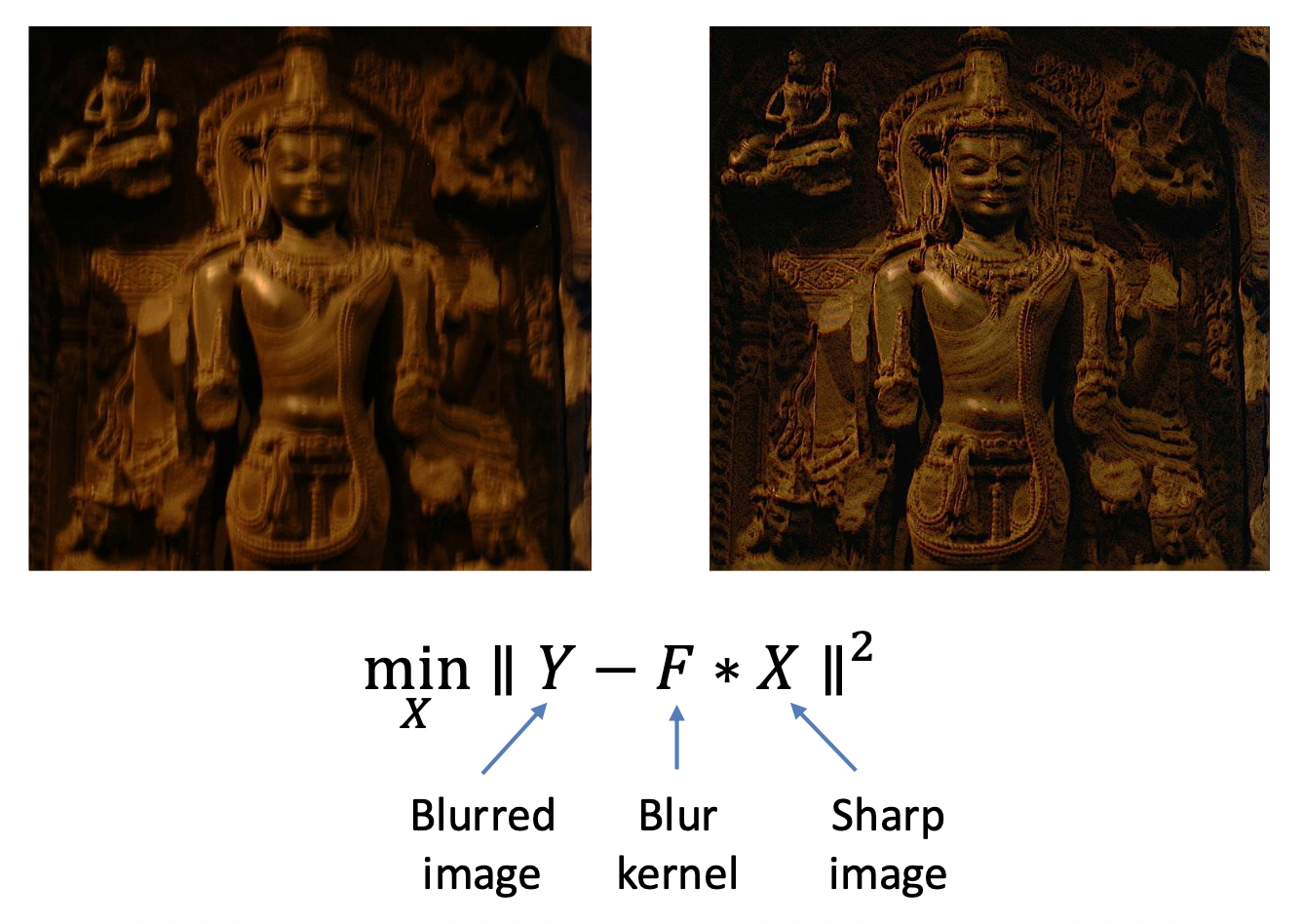
图像去模糊
Model Fitting⚓︎
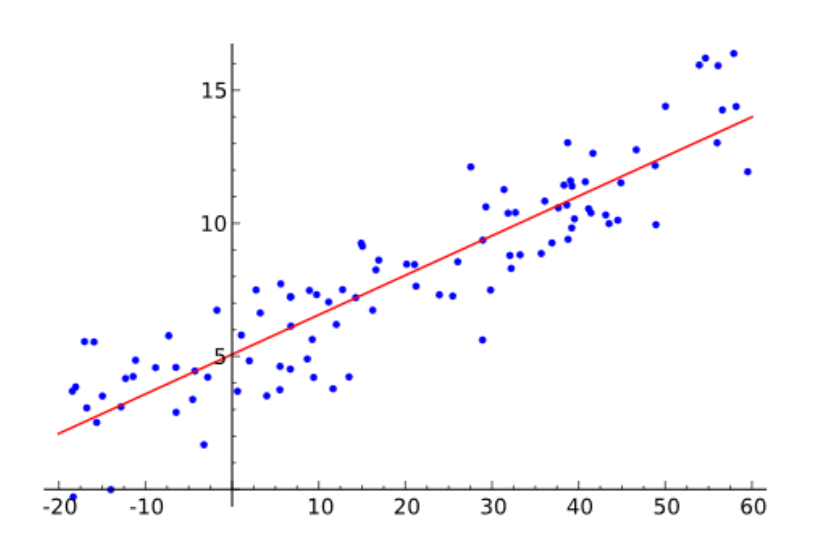
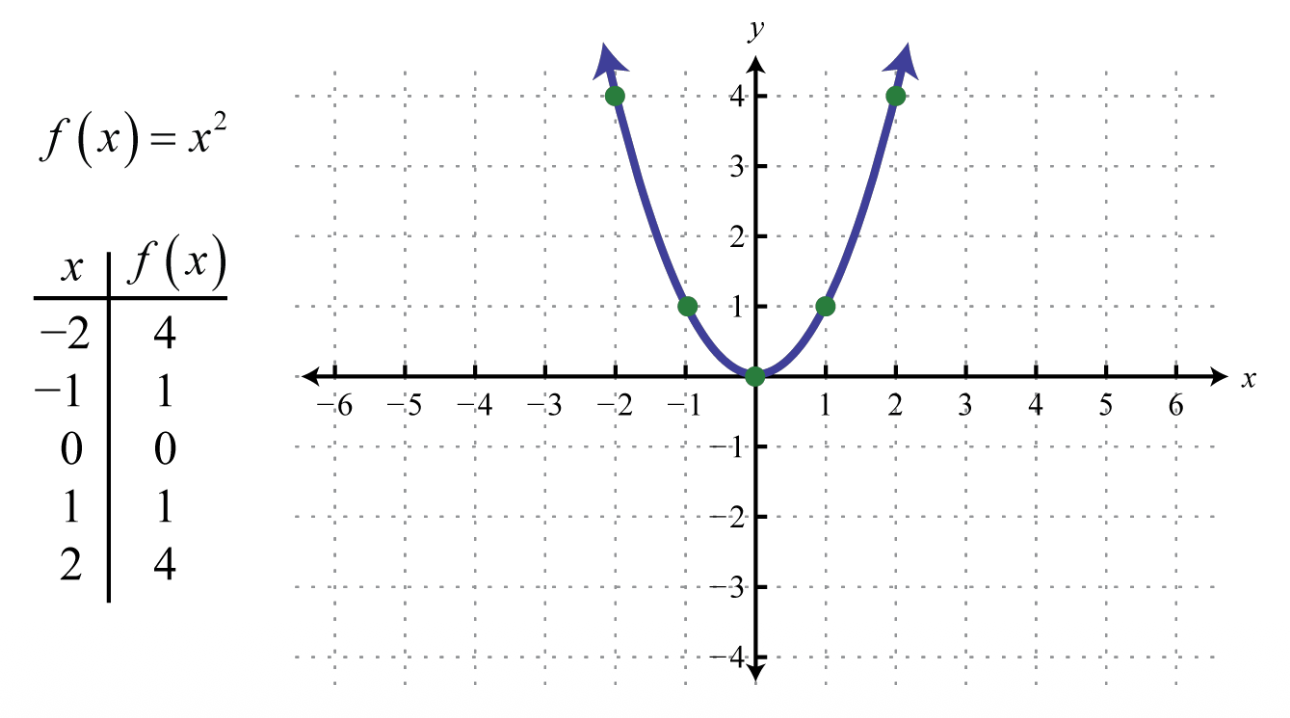
数学模型 \(b = f_x(a)\) 描述了输入 \(a\) 和输出 \(b\) 之间的关系,期中 \(x\) 为模型参数。
例子:线性模型 \(b = a^T x\)(如右图所示)
那么如何根据数据估计模型参数(这一过程通常称之为学习(learning))呢?一种典型的方法是最小化均方差(mean square error, MSE),即:
Maximum Likelihood Estimation⚓︎
假设数据带有高斯噪音,即: $$ b_i = a_i^T x + n, n \sim G(0, \sigma) $$
对于给定 \(x\),观察到 \((a_i, b_i)\) 的可能性为: $$ P[(a_i, b_i)|x] = P[b_i - a_i^T x] \propto \exp \left(-\dfrac{(b_i - a_i^T x)^2}{2 \sigma^2}\right) $$
如果这些数据点都是独立的,那么:
最大似然估计(maximum likelihood estimation, MLE) = 最大化找到最佳 \(x\) 的可能性,即:
所以 MSE 就是带有高斯噪音假设的 MLE。
Numerical Methods⚓︎
一些问题是有分析解(analytical solution) 的,比如对于线性 MSE(\(\hat{x} = \arg \min\limits_x \|Ax - b\|_2^2\)
但有些问题没有分析解,比如寻找满足以下条件的路径:\(F(x_0) > F(x_1) > \dots > F(x_k) > \dots\)。
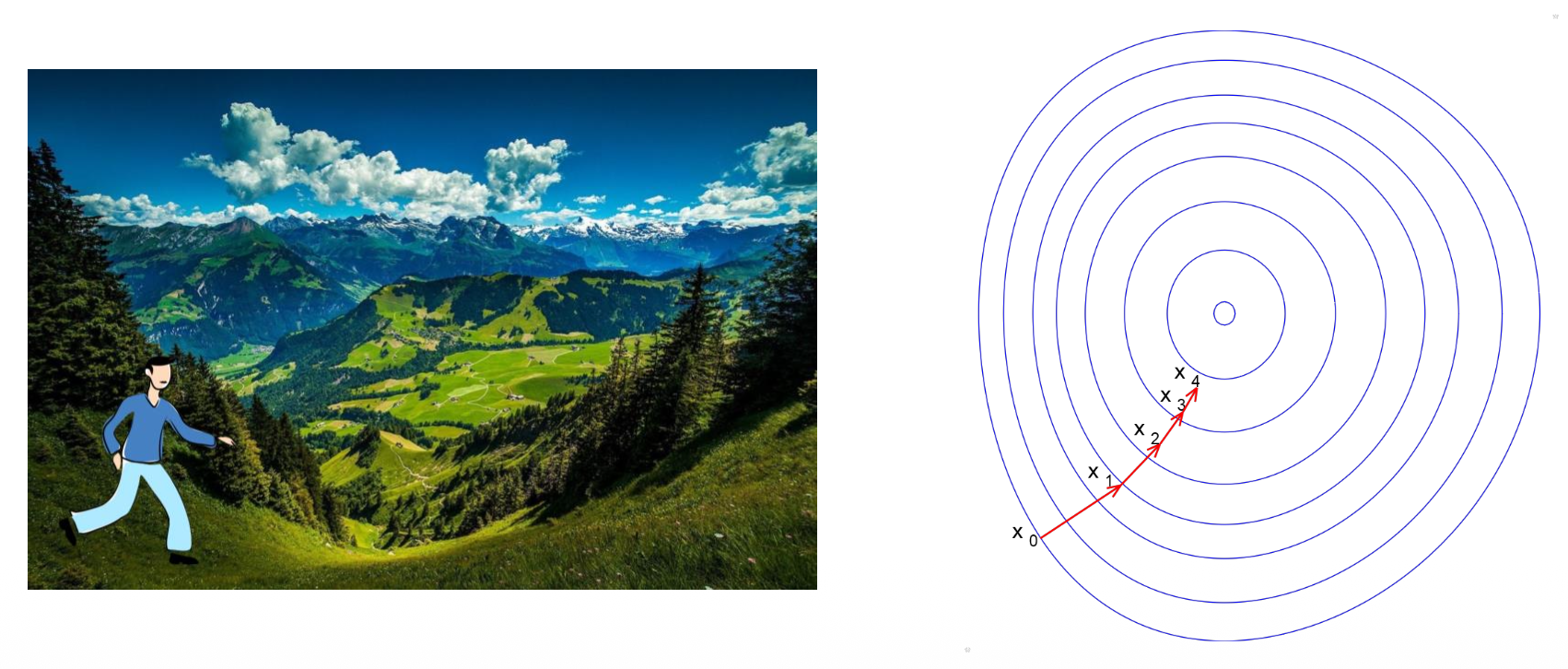
对于这类问题,我们给出以下算法求解:
x <- x_0 # initialization
while not converge
h <- descending_direction(x) # determine the direction
alpha <- descending_step(x, h) # determine the step
x <- x + alpha * x # update the parameters
现在的问题就变成了如何寻找最佳的 \(\bm{h}, \alpha\) 了。
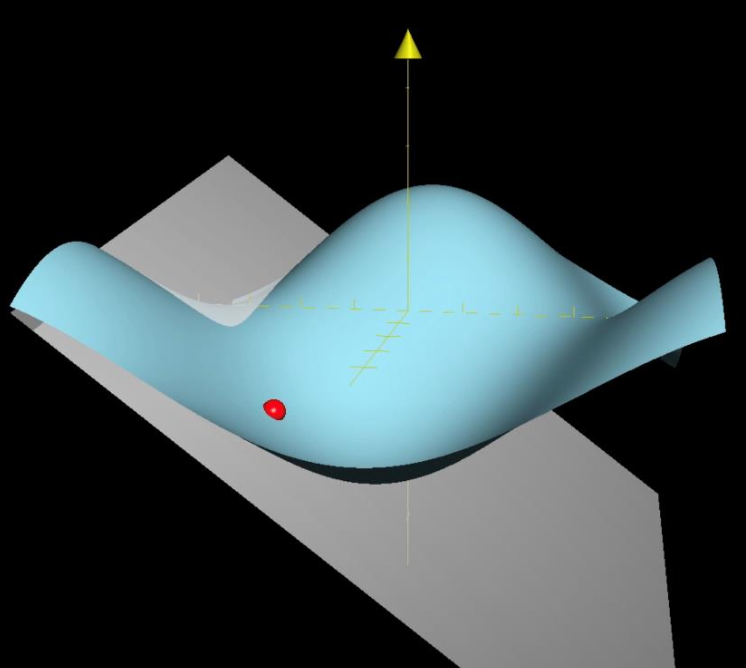
Steepest Descend Method⚓︎
泰勒展开
-
一阶近似
 \[ F(x_k + \Delta x) \approx F(x_k) + J_F \Delta x \]
\[ F(x_k + \Delta x) \approx F(x_k) + J_F \Delta x \]其中 \(\mathbf{J} = \begin{bmatrix}\dfrac{\partial \mathbf{f}}{\partial x_1} \dots \dfrac{\partial \mathbf{f}}{\partial x_n}\end{bmatrix}\) 为雅可比矩阵(Jacobian matrix)(一阶导数)
-
二阶近似
\[ \begin{aligned}F(x_k+\Delta x)\approx F(x_k)+J_F\Delta x+\frac{1}{2}\Delta x^TH_F\Delta x\end{aligned} \]其中 \(\mathbf{H}=\begin{bmatrix}\frac{\partial^2f}{\partial x_1^2}&\frac{\partial^2f}{\partial x_1\partial x_2}&\cdots&\frac{\partial^2f}{\partial x_1\partial x_n}\\\\\frac{\partial^2f}{\partial x_2\partial x_1}&\frac{\partial^2f}{\partial x_2^2}&\cdots&\frac{\partial^2f}{\partial x_2\partial x_n}\\\\\vdots&\vdots&\ddots&\vdots\\\\\frac{\partial^2f}{\partial x_n\partial x_1}&\frac{\partial^2f}{\partial x_n\partial x_2}&\cdots&\frac{\partial^2f}{\partial x_n^2}\end{bmatrix}\) 为黑塞矩阵(Hessian matrix)(二阶导数)
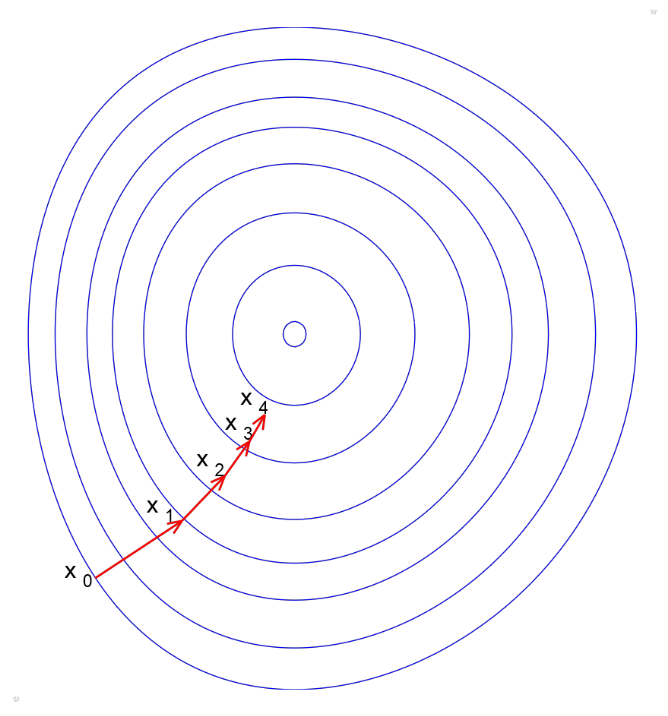
第一种方法是梯度下降(gradient descent),它就是通过泰勒展开的一阶近似来确定方向的。
-
在 \(x_0\) 处的泰勒展开
\[ F(x_{0}+\Delta x)\approx F(x_{0})+J_{F}\Delta x \] -
当 \(J_F \Delta x < 0\) 时,目标函数就会下降
- 当 \(\Delta x\) 的方向和 \(-J_F^T\) 一样时,目标函数下降幅度最大(即最陡(steepest))
步长(step size) 的影响:
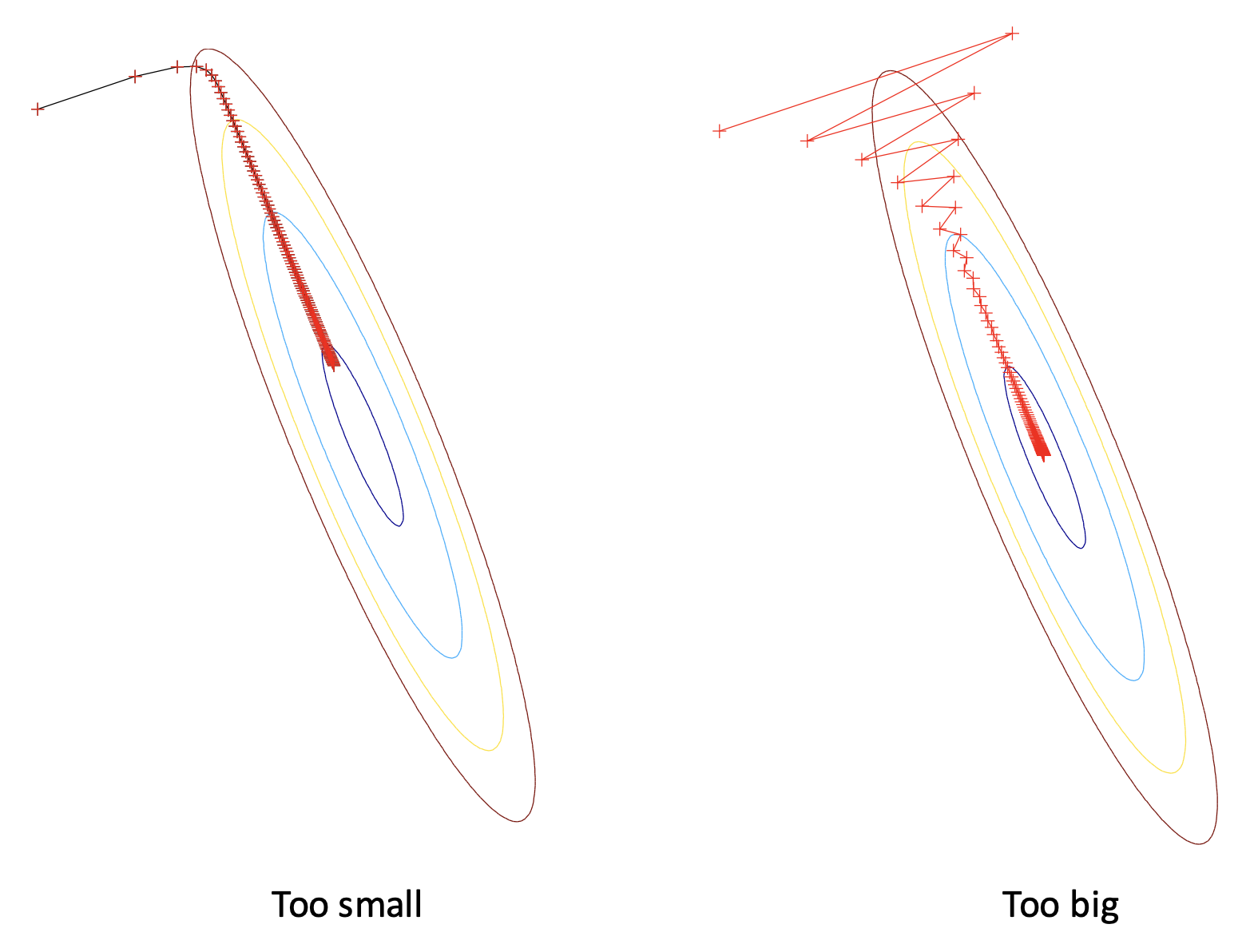
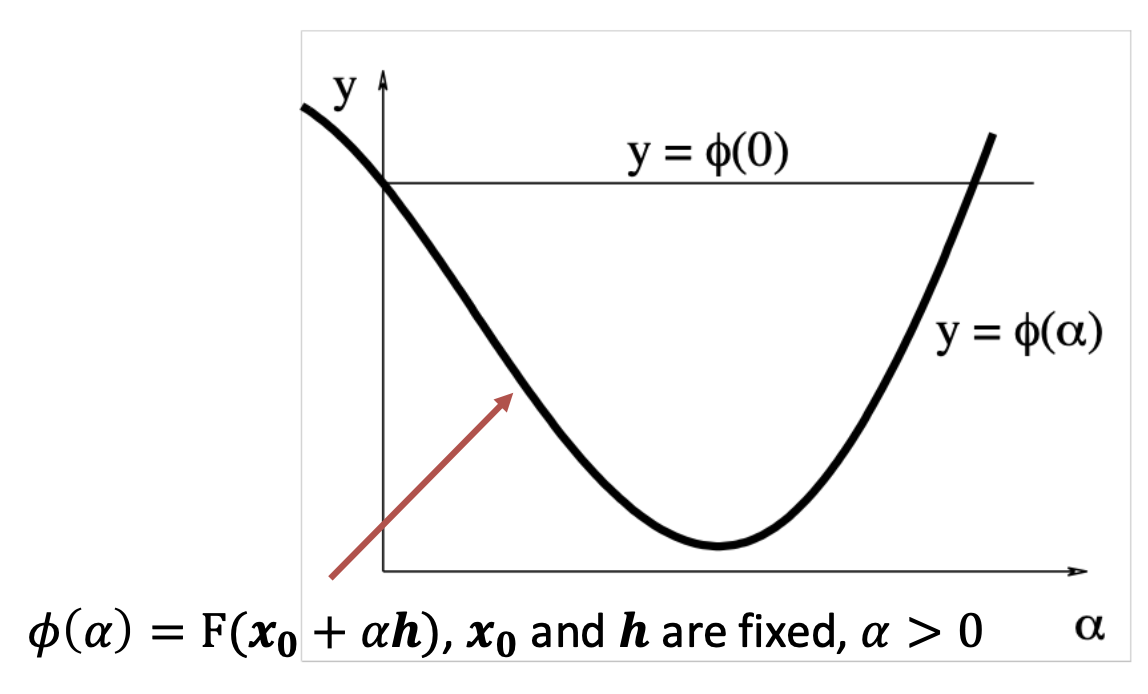
确定步长:
- \(\alpha\) 太小,\(\varphi(\alpha)\) 的改变也很小 -> 增大 \(\alpha\)
- \(\alpha\) 太大,\(\varphi(\alpha) > \varphi(0)\) -> 减小 \(\alpha\)
- \(\alpha\) 和 \(\varphi(\alpha)\) 接近 -> 可接受的
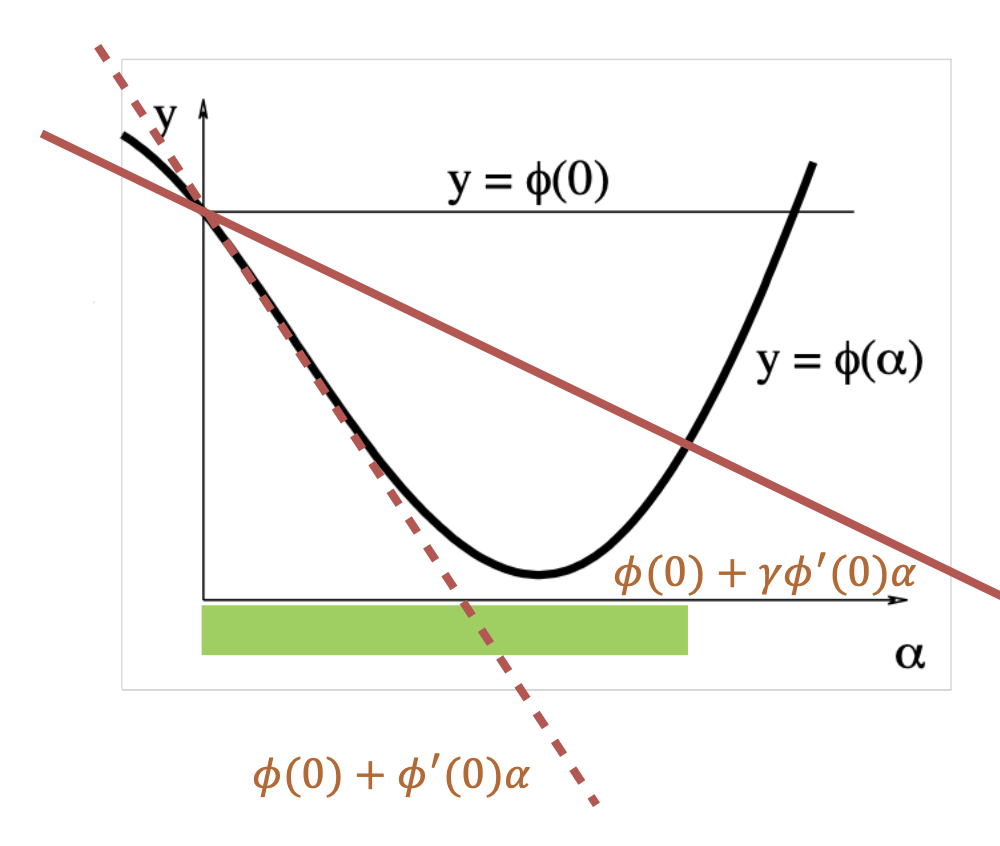
- 精确的直线搜索
- 回溯算法(backtracking algorithm)
- 使用一个很大的 \(\alpha\) 值初始化
- 减小 \(\alpha\),直到 \(\phi(\alpha)\leq\phi(0)+\gamma\phi^{\prime}(0)\alpha\)
- 其中参数 \(0 < \gamma < 1\)
最陡下降法
- 优点
- 易于实现
- 在远离最小值时表现不错
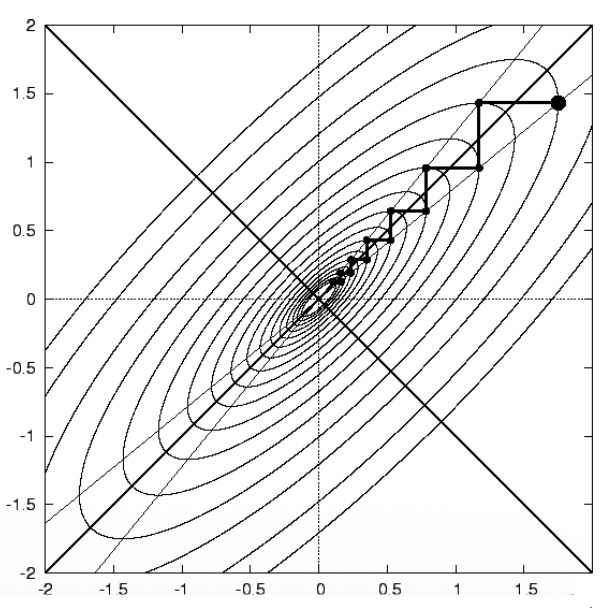
- 缺点
- 接近最小值时收敛很慢
- 原因:只使用一阶导数,没用到曲率
- 浪费大量计算
- 接近最小值时收敛很慢
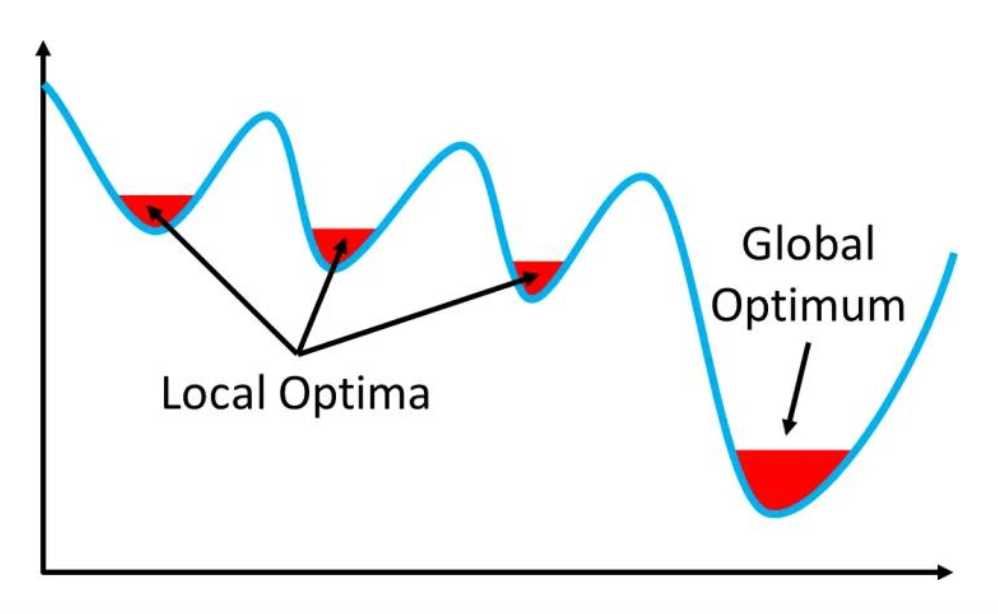
- 梯度下降法只能找到局部最小值(local minimum)
- 但对一些函数而言,局部最小就是全局最小
Newton Method⚓︎
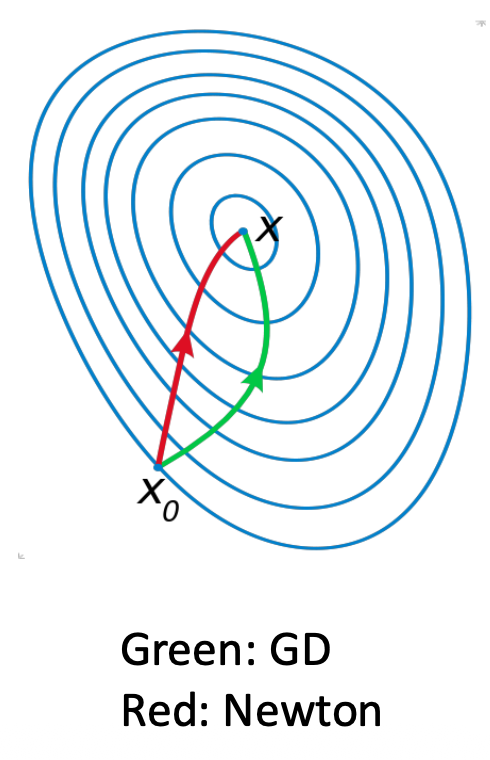
第二种方法是牛顿法(Newton method):
-
采用二阶泰勒展开
\[ F(x_k + \Delta x) \approx F(x_k) + J_F \Delta x + \dfrac{1}{2} \Delta x^T H_F \Delta x \] -
找到最小化 \(F(x_k + \Delta x)\) 的 \(\Delta x\),满足:
\[ H_F \Delta x + J_F^T = 0 \] -
最优方向(牛顿步)为 \(\Delta x = -H_F^{-1} J_F^T\)
- 优点:在最小值附近快速收敛
- 缺点:在黑塞矩阵上要花费大量计算
- 改进思路:近似计算黑塞矩阵?
Gauss-Newton Method⚓︎
牛顿法的改进方法叫做高斯 - 牛顿法(Gauss-Newton method)。
-
对求解非线性最小二乘很有用
-
非线性最小二乘
\[ \begin{aligned} \hat{x} & = \arg \min\limits_x F(x) \\ & = \arg \min\limits_x \| R(x) \|_2^2 \end{aligned} \]其中 \(R(x) = \begin{bmatrix}b_1 - f_x(a_1) \\ b_2 - f_x(a_2) \\ \dots \\ b_n - f_x(a_n)\end{bmatrix}\) 是残差向量(residual vector)
-
我们不展开 \(F(x)\),而去展开 \(R(x)\)
\[ \begin{aligned} \|R(x_k + \Delta x)\|_2^2 & \approx \|R(x_k) + J_R \Delta x\|_2^2 \\ & = \|R(x_k)\|_2^2 + 2R(x_k)^T J_R \Delta x + \Delta x^T J_R^T J_R \Delta x \end{aligned} \]其中 \(J_R\) 是 \(R(x)\) 的雅可比矩阵
-
优化 \(\Delta x\),满足
\[ J_R^T J_R \Delta x + J_R^T R(x_k) = 0 \]
-
-
-
因此优化方向 \(\Delta x = -(J_R^T J_R)^{-1} J_R^T R(x_k)\)
-
和牛顿法相比
- 牛顿步:\(\Delta x = -H_F^{-1} J_F^T\)
- 可以看到,高斯 - 牛顿法使用 \(J_R^T J_R\) 近似表示 \(H_F\)
-
优点:
- 无需计算黑塞矩阵
- 收敛快
- 缺点:如果 \(J_R^T J_R\) 是奇异的,那算法就会不稳定
Levenberg-Marquardt⚓︎
Levenberg-Marquardt 法(以下简称 LM)在高斯 - 牛顿法的基础上引入正则化(regularization),因此 $$ \Delta x = -(J_R^T J_R \textcolor{red}{+ \lambda I})^{-1} J_R^T R(x_k) $$
其中 \(\forall \lambda > 0\),\(J_R^T J_R + \lambda I\) 必须是正定矩阵(positive-definite matrix)。
\(\lambda\) 的影响:
- \(\lambda \rightarrow \infty\):梯度下降法,且步长很小
- \(\lambda \rightarrow 0\):高斯 - 牛顿法
优点:
- 启动快(\(\lambda \uparrow\))
- 收敛快(\(\lambda \downarrow\))
- 不会退化(\(J_R^T J_R + \lambda I\) 必定是正定的)
- LM 法 = 梯度下降法 + 高斯 - 牛顿法
Constrained Optimization⚓︎
约束优化(constrained optimization):目标 (objective) + 约束 (constraints)
不同的方法有不同的约束类型:
凸优化 (convex optimization)
Robust Estimation⚓︎
- 内点(inlier):遵循模型假设的数据点
- 异常点(outlier):和假设有显著差异的数据点
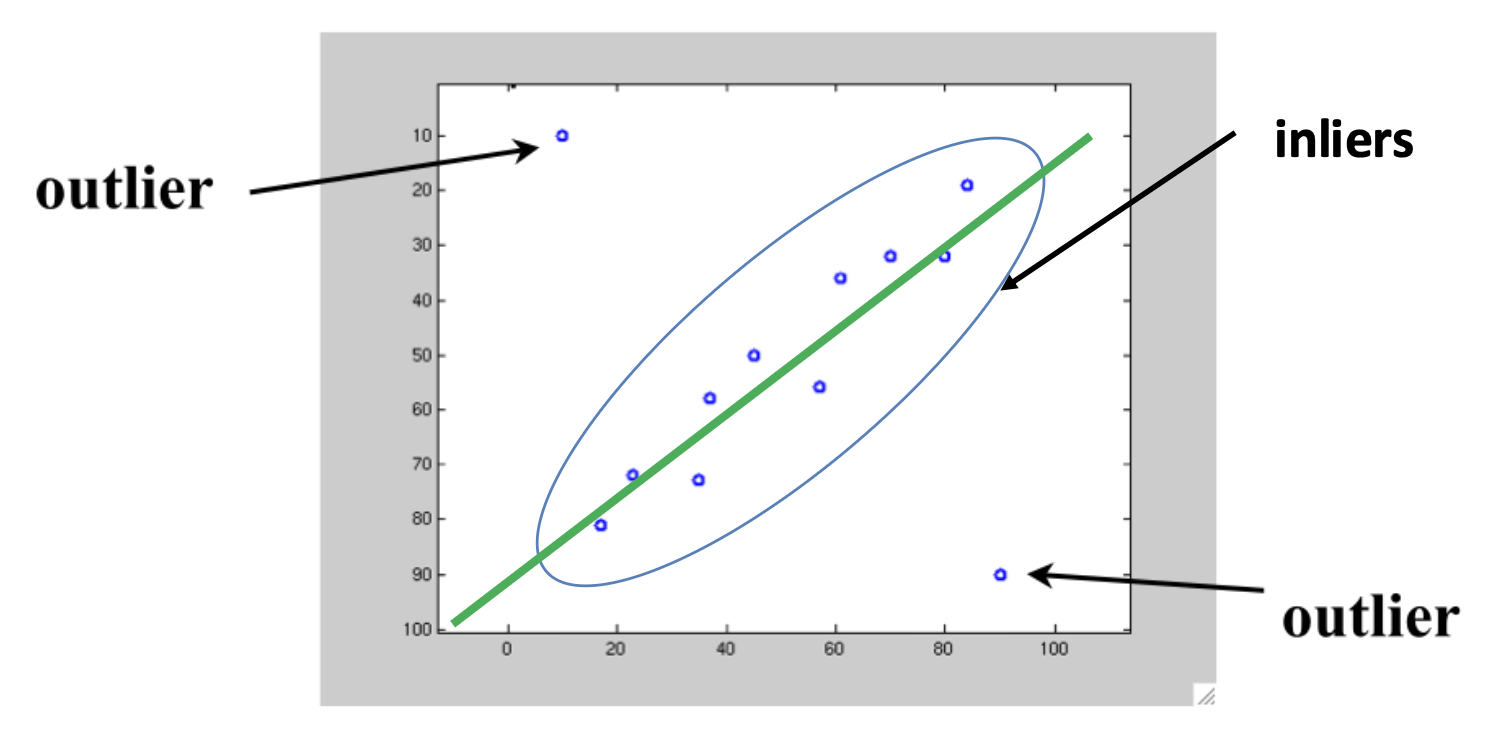
对于以下情况,MSE 失效了:
原因:
- MSE 与残差平方成正比
- 受大量异常点影响
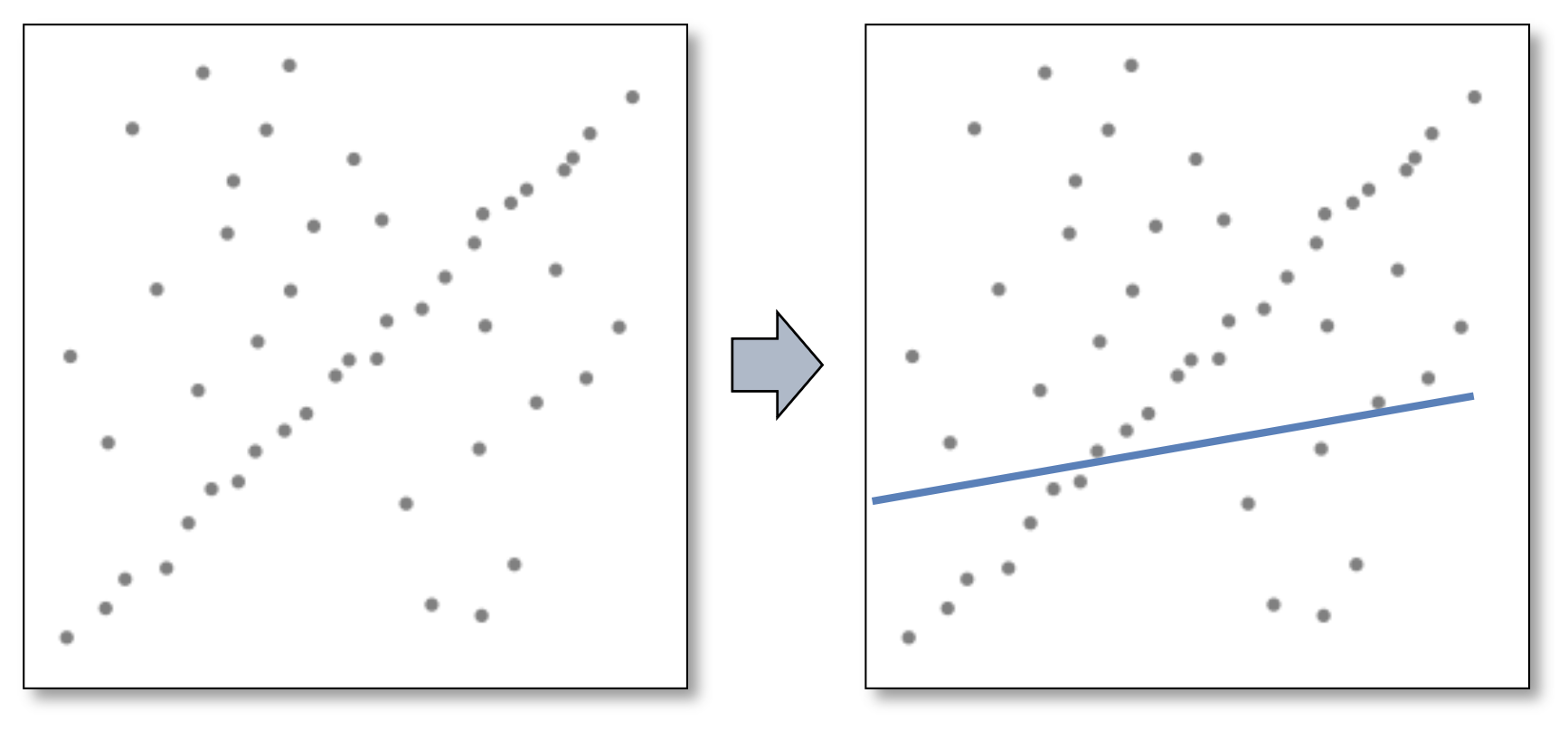
RANSAC⚓︎
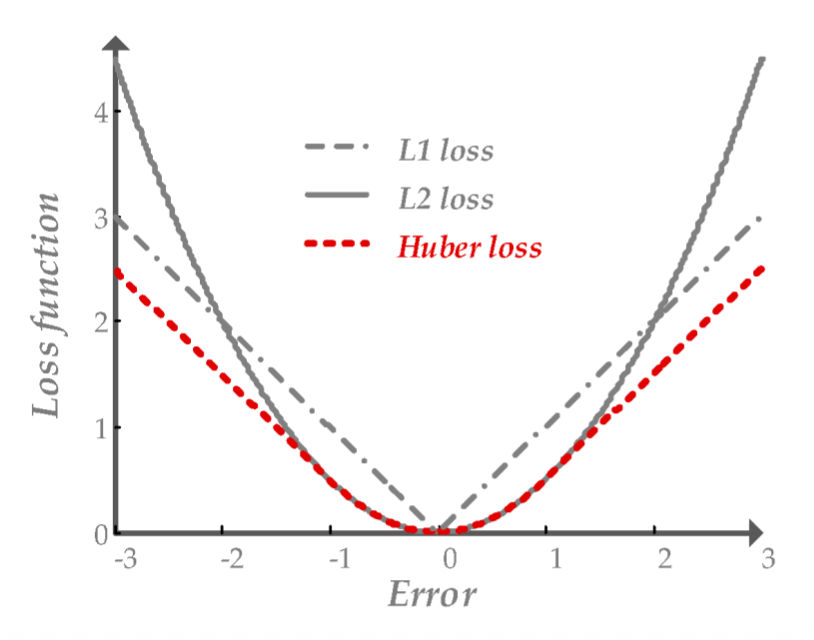
为减小异常点对估计带来的影响,我们需要用别的损失函数来替代 MSE,比如 L1,Huber 等。像这些函数被称为鲁棒函数(robust function)。
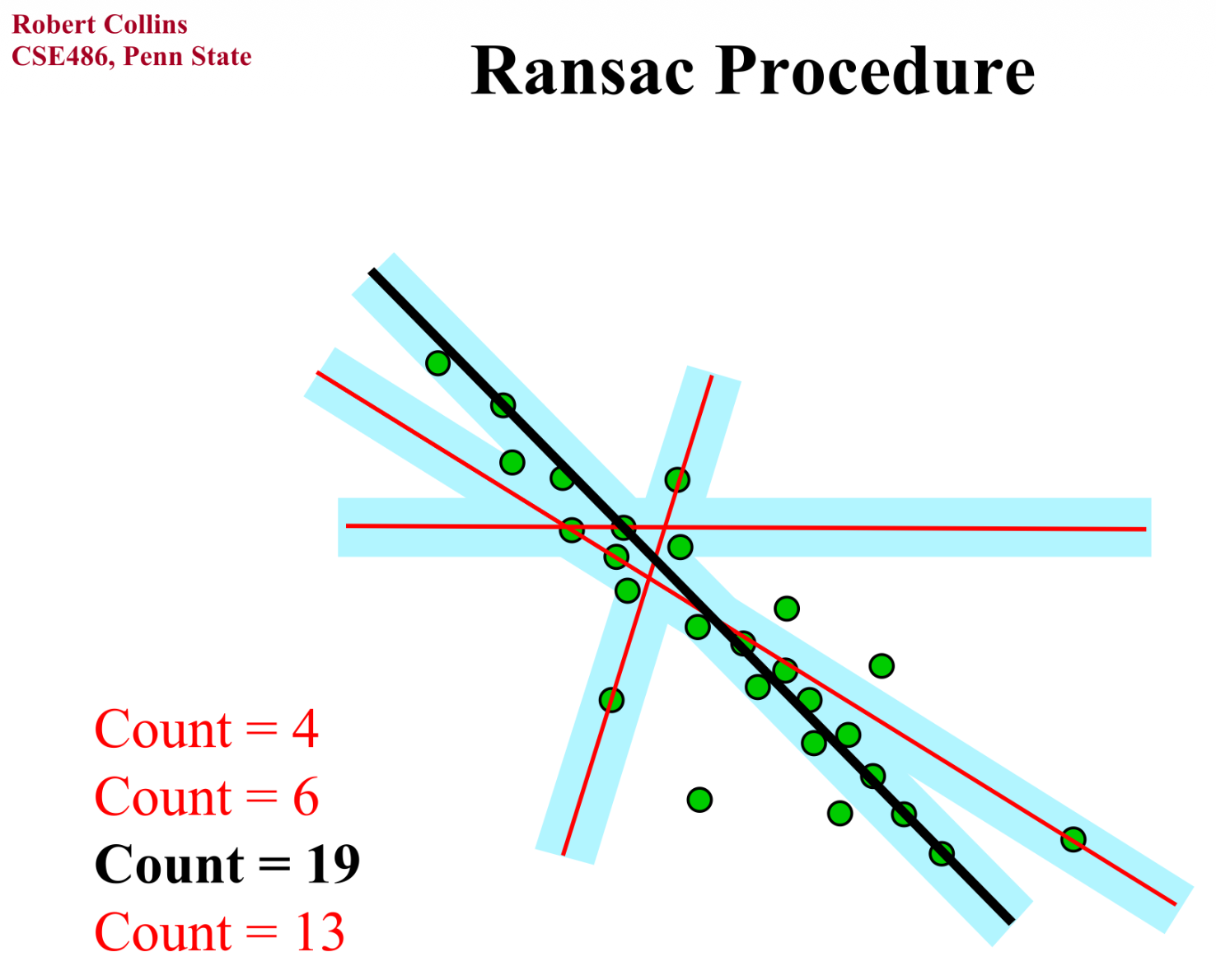
其中,最强大的处理异常点的方法是 RANSAC(随机抽样一致 (random sample concensus)
- 内点的分布是相似的,而外点之间的差距很大
- 使用数据点对进行投票
例子
Overfitting and Underfitting⚓︎
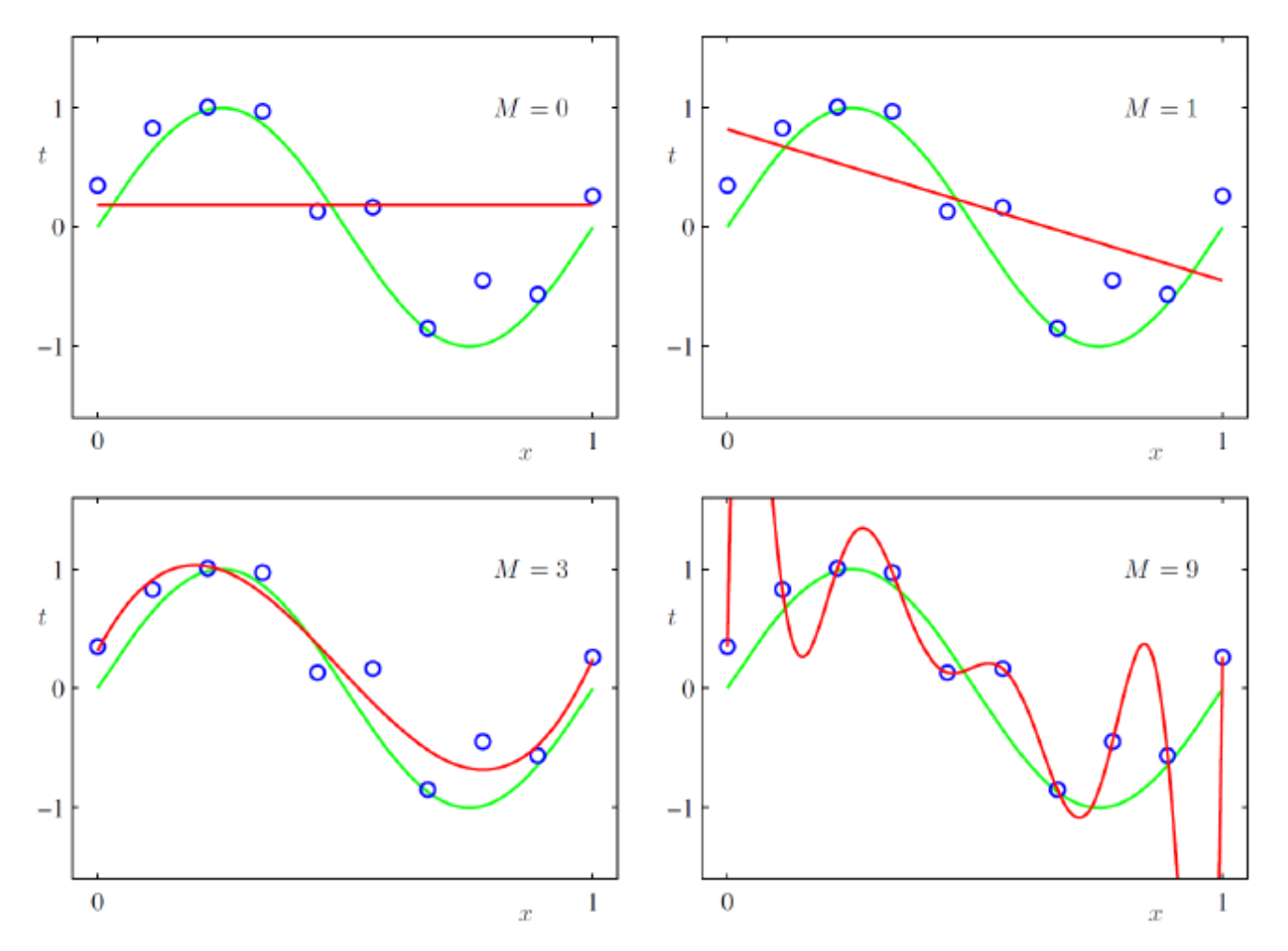
不适定问题(ill-posed problem):解不唯一
- 比如对于 \(\min_x \|Ax - b\|^2\) 方程数少于变量数的时候
- 可通过利用先验知识增加更多约束来获得唯一解
L2 Regularization⚓︎
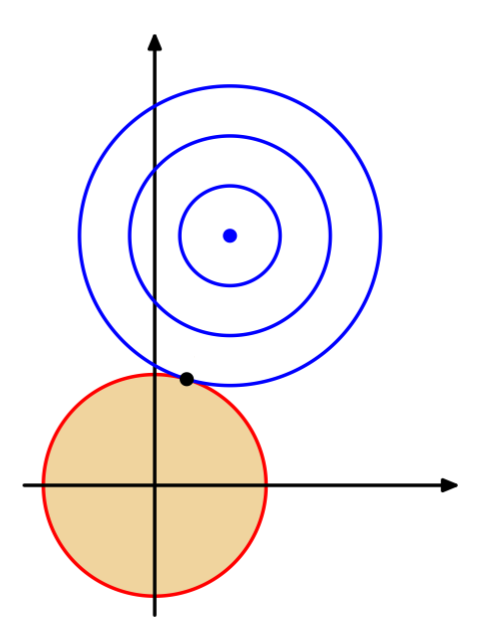
- L2 范数(norm):\(\|x\|_2 = \sum_i x_i^2\)
-
L2 正则化:
\[ \begin{aligned} & \min_x \|Ax - b\|_2^2 \\ & \text{s.t. } \|x\|_2 \le 1 \end{aligned} \]- 令 \(x \rightarrow 0\)
- 抑制冗余变量
L1 Regularization⚓︎
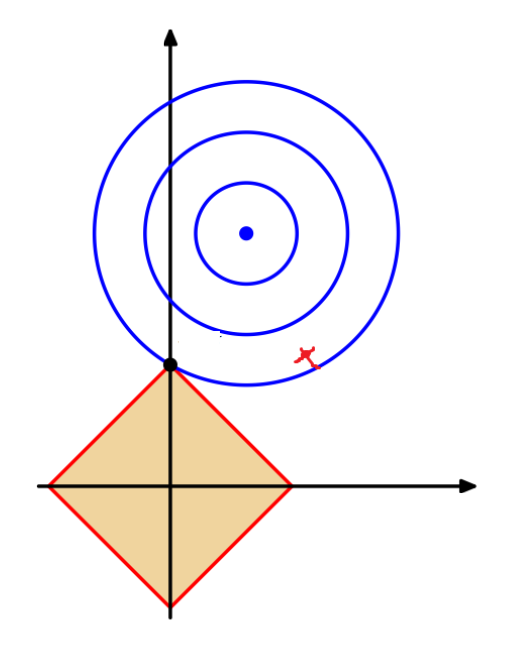
- L1 范数(norm):\(\|x\|_1 = \sum_i x_i\)
-
L2 正则化:
\[ \begin{aligned} & \min_x \|Ax - b\|_2^2 \\ & \text{s.t. } \|x\|_1 \le 1 \end{aligned} \]- 令 \(x\) 稀疏
评论区